Checking an aircraft for damage can be arduous and meticulous work, but last week’s issue of The Economisthighlights an experimental commercial approach. In simple terms, the Remote Intelligent Survey Equipment for Radiation (RISER) drone is a quadcopter with LIDAR and forms the basis for a system to use lasers to automatically detect damage to airliners.
The obvious naval application for inspector drones would be for ground-, carrier, and surface vessel-based fixed-wing and helicopter units, although the configurations for each aircraft type and location might make some more practical than others. For example it probably makes more sense to consolidate expertise in inspector drones at regional maintenance and readiness centers than to try to outfit a unit in the small helicopter hangar of every destroyer. But there’s always something to be said for an operational capability.
While The Economist notes that the drones are allowed at Luton airport, UK, to “operate only inside hangars, and only when the doors are shut,” similar systems could be used during periods of extended surface ship and submarine maintenance, particularly while in dry dock to check for damage and wear and tear to those vessels’ hulls and systems.
We’ve speculated previously at CIMSEC on the utility of LIDAR-equipped shipboard robots and autonomous systems to engage in damage control, but external hull and airframe inspection drones add a wrinkle and join an ever-growing list of potential (and actualized) uses for drones.
Scott Cheney-Peters is a surface warfare officer in the U.S. Navy Reserve and founder and Chairman of the Center for International Maritime Security (CIMSEC). He is a graduate of Georgetown University and the U.S. Naval War College, a member of the Truman National Security Project, and a CNAS Next-Generation National Security Fellow.
CIMSEC content is and always will be free; consider a voluntary monthly donation to offset our operational costs. As always, it is your support and patronage that have allowed us to build this community – and we are incredibly grateful.
As a closer to last week’s run of UUV articles – a publication review by Sally DeBoer, UUV week’s associate editor.
Discussion of how the world’s navies will incorporate unmanned underwater vehicles into their doctrine and infrastructure is very broad indeed. Will these technologies be complementary to existing architecture or stand-alone platforms? Will they operate autonomously (indeed, can we even achieve the degree of autonomy required?) or with a man-in-the-loop? Perhaps because the technology is so (relatively) new and (relatively) unestablished, with potential applications so vast, the conversation surrounding it blurs the line between what is and what if.
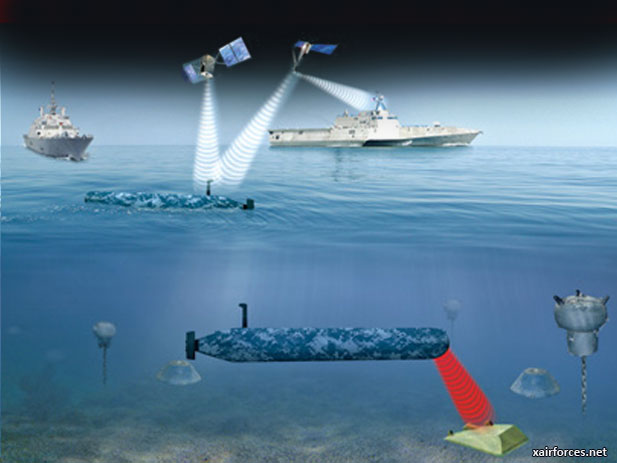
Conceptualization of the US Navy UUV concept
Thankfully, the meticulous staff at the RAND Corporation’s National Defense Research Institute, sponsored by the US Navy, produced a thorough and carefully researched study in 2009 outlining the most practical and cost-effective applications for underwater technologies. Using the US Navy’s publically-available 2004 UUV Master Plan (an updated version of this document was produced in 2011 but has not been released to the public) as a jumping off point, the authors of the study evaluated the missions advocated for UUVs in terms of military need, technical risks (as practicable), operational risks, cost, and possible alternatives. Analyzing an “unwieldy” set of 40 distinct missions spanning nine categories initially advocated in the 2004 version UUV Master Plan, the study delivers a more focused approach to how the US Navy might best and most effectively incorporate these unmanned systems. Though the UUV Master Plan document is, admittedly, quite out of date (the study itself now more than six years old), the findings therein are still highly relevant to the discussion surrounding the future of unmanned technologies beneath the waves.
Working with the very limited data available on UUVs, the authors of the study considered the technical issues inherent in developing and fielding unmanned underwater systems. Though the full complement of UUV hardware and software is considered in the study, for brevity’s sake this publication review will focus only on two technical factors: autonomy and communications. Intuitively, some missions (such as those of a clandestine or sensitive nature) demand more autonomy than others (like infrastructure monitoring or environmental surveillance). Pertaining to ISR missions, the study suggested that vehicle autonomy limitations would be a significant limiting factor. AUVs may not, for instance, be able to effectively determine what collected information is time-critical and what information is not. This potential weakness could be a tremendous risk; either the notional AUV would fail to transmit information in a timely manner or it would transmit non-useful information needlessly, risking detection and sacrificing stealth. Without significant development, therefore, lack of autonomy would present a technical challenge and, for some advocated missions, an operational risk. In the words of the authors “autonomy and bandwidth form a trade-space in which onboard autonomy is traded for reach-back capability and visa-versa.” The study also addressed perhaps the most frequently cited criticism of UUV technologies: communications and connectivity. Submerged UUVs, the study concludes, are limited in their ability to communicate by “the laws of physics,” while surfaced UUV’s ability to communicate are limited by technology (mast height, data output rates) and present yet another trade-off between stealth and connectivity. These communication systems are, in the words of the authors, considered mature, and are unlikely to be significantly improved by additional research and development.
It’s important to note (and probably obvious to readers) that development of technologies to address the challenges of autonomy and communication for UUV platforms are likely completely opaque to this author. The study’s findings, however, seem to match the challenges the US Navy is facing developing UUVs in the years after its publication. The Office of Naval Research’s Large Displacement Unmanned Underwater Vehicle (LDUUV) program awarded a $7.3million contract to Metron Inc. to develop and field autonomy software, hardware, and sensors. The LDUUV, a pier-launched system, intended for endurance missions of more than seventy days, will need to effectively avoid interference, requiring a high degree of autonomy. A 2011 Office of Naval research brief envisioned that the LDUUV would “enable the realization of fully autonomous UUVs operating in complex near shore environments” concurrent with the development of “leap ahead” technologies in autonomy. In November of 2014, ONR unveiled a plan to develop an ASW mission package for the LDUUV, pursuing technology development in mission autonomy, situational awareness, and undersea sensors, with emphases on software-in-the-loop and hardware-in-the-loop simulations, and other ASW mission package components. Whether or not intensive R&D will produce the degree of “leap ahead” autonomy necessary for such operations remains to be seen. In the meantime, however, the RAND study’s recommended UUV missions are of particular interest and may dictate the application of funding in a time of scarcity. Put another way, the study’s conclusions provide a cogent and clear roadmap for what the US Navy can do with UUVs as they are and will reasonably become, not how it would like them or envision them to be.
LDUUV Prototype
So, then, there is the million (multi-billion?) dollar question: what missions are practically and cost-effectively best suited for UUVs, given these limitations, especially if a mismatch between desired technical functionality and funding and actual ability and allotments continues? The authors suggest (in concurrence with CIMSEC’s own Chris Rawley) that UUV technologies are first and foremost best suited for mine countermeasures, followed in priority by missions to deploy leave-behind sensors, near-land or harbor monitoring, oceanography, monitoring undersea infrastructure, ASW tracking, and inspection/identification in an ATFP or homeland defense capacity. These recommendations are based on already-proven UUV capabilities, cost-effectiveness, and demand. UUVs performing these missions, in particular MCM, have seen steady and
Conceptualization of the Knifefish SMCM UUV System
encouraging progress in the years since the study’s publication. NATO’s Center for Maritime Research and Exploration (CMRE)collected and analyzed data from four UUVs with high-resolution sonar deployed during Multinational Autonomy Experiment (MANEX) 2014. The Littoral Combat Ship’s (LCS) mine-hunting complement includes a pair of Surface Mine Countermeasures (SMCM) UUVs, dubbed Knifefish,that uses its low-frequency broadband synthetic aperture side-scanning sonar to look for floating, suspended, and buried mines and an onboard processor to identify mines from a database. The way ahead for longer-term missions demanding greater autonomy and reach-back over long distances is, for the time being, less clear.
This publication review is truly a very (very!) cursory glance at an incredibly detailed, highly technical study, and in no way does justice to the breadth and depth of the document. I encourage interested readers to download the original .pdf. However, the study’s contributions to an overall understanding of how and where UUVs can practically and cost-effectively support naval operations are significant, effectively reckoning the need to develop cutting-edge technologies with sometimes harsh but ever-present operational and financial realities. UUVs will undoubtedly have a significant role in the undersea battle-space in the years to come; RAND’s 2009 study provides keen insight into how that role may develop.
Sally DeBoer is an associate editor for CIMSEC. She is a graduate of the United States Naval Academy and a recent graduate of Norwich University’s Master of Arts in Diplomacy program. She can be reached at Sally.L.DeBoer(at)gmail(dot)com.
As potential adversaries sharpen their abilities to deny U.S. forces the freedom to maneuver, they concurrently constrain America’s traditional strength in supporting expeditionary power. Sea-bases bring the logistical “tail” closer to the expeditionary “teeth,” but they must stay outside the reach of A2/AD threats. Submarines remain the stealthiest military platform and will likely remain so for some time to come. In addition to their counter-force and counter-logistics roles, subs have seen limited service as stealth cargo vessels. History demonstrates both the advantages and limitations of submarines as transports. Submarine troop carriers, such as those used in SOF operations, are distinct from submarine freighters; the submarine’s role in supply and sustainment is addressed here. Unmanned Underwater Vehicles (UUVs) will revolutionize minesweeping, intelligence collection, and reconnaissance. But they may also finally deliver on the century-old promise of the submarine as a stealthy logistics platform.
Deutschland (Launched 1916)
Although early submarine pioneers like Simon Lake saw commercial advantage in subs’ ability to avoid storms and ice, submarines as cargo carriers were first used operationally to counter Britain’s A2/AD strategy against Germany in World War I. The Deutschland and her sister boat Bremen were to be the first of a fleet of submarine blockade-runners whose cargo would sustain the German war effort. Despite her limited payload – only 700 tons – the privately-built Deutschland paid for herself and proved her design concept with her first voyage. But the loss of Bremen and America’s turn against Germany scuttled the project.
Cargo subs were again employed in World War II. The “Yanagi” missions successfully transported strategic materials, key personnel, and advanced technology between Germany and Japan. The Japanese also built and used subs to resupply their island garrisons when Allied forces cut off surface traffic. Their efforts met with limited success – enough to continue subsequent missions but not enough to shift the outcome of the Allied strategy. The Soviet Union also used submarines to sustain forces inside denied areas at Sevastopol and elsewhere. These efforts inspired serious consideration of submarine transports that carried over well into the Cold War. Soviet designers produced detailed concepts for “submarine LSTs” capable of stealthily deploying armor, troops and even aircraft.
Dr. Dwight Messimer, an authority on the Deutschland, points out that cargo subs – with one notable exception – have never really surmounted two key challenges. They have limited capacity compared with surface transports, and their cost and complexity are far greater. If subs are made larger for greater capacity, they forfeit maneuverability, submergence speed, and stealth. If built in greater numbers their expense crowds out other necessary warship construction. The Deutschland and Japan’s large transport subs handled poorly and were vulnerable to anti-submarine attacks. Many cargo subs were converted into attack subs to replace attack-sub losses.
The one notable exception to these difficulties is “cocaine subs” so
A “narco-submarine” is apprehended off Honduras
frequently encountered by the US Coast Guard. These rudimentary stealth transports are simple and inexpensive enough to construct in austere anchorages, make little allowance for crew comfort, and have proven successful in penetrating denied US waters. The tremendous value of their cargoes means that only a few of these semi-subs need to run the blockade for their owners’ strategy to succeed.
Logistical submarine designers could potentially overcome their two primary challenges by drawing inspiration from smugglers and from nature. UUVs, like other unmanned platforms, enjoy the advantages gained by dispensing with crew accommodations or life-support
MSub’s MASTT
equipment. Large UUVs built and deployed in large numbers, like cocaine subs and pods of whales, could transport useful volumes of cargo in stealth across vast distances. MSubs’ Mobile Anti-Submarine Training Target (MASTT), currently the largest UUV afloat, offers a glimpse at what such UUVs might look like. At 60 metric tons and 24 meters in length, MASTT is huge by UUV standards but very small compared to most manned subs.
3D printing technology is rapidly expanding, producing larger objects from tougher, more durable materials. Already, prototype systems can print multistory concrete structures and rocket engines made of advanced alloys. It will soon be possible to print large UUV hulls of requisite strength and size in large numbers. Indeed, printed sub and boat hulls were one of the first applications conceived for large-scale 3D printing. Their propulsion systems and guidance systems need not be extremely complex. Scaled-down diesel and air-independent propulsion systems, again mass-produced, should suffice to power such large UUVs. These long-endurance mini-subs would notionally be large enough to accommodate such power-plants.
10 large UUVs of 30 tons’ payload each could autonomously deliver 300 tons of supplies to forward positions in denied areas. 300 tons, while not a great deal in comparison to the “iron mountain” of traditional American military logistics, is nevertheless as much as 5 un-stealthy LCM-8s can deliver.
A “pod” of such UUVs could sail submerged from San Diego, recharging at night on the surface, stop at Pearl Harbor for refueling and continue on their own to forward bases in the Western Pacific.
Their destinations could be sea-bases, SSNs and SSGNs, or special forces units inserted onto remote islands. Cargoes could include food, ammunition, batteries, spare parts, mission-critical equipment, and medical supplies. In all these cases, a need for stealthy logistics – the need to hide the “tail” – would call for sub replenishment versus traditional surface resupply. Depending on the mission, large UUVs could be configured to rendezvous with submerged subs, cache themselves on shallow bottoms, or run aground on beaches. Docking collars similar to those used on deep-submergence rescue vehicles could permit submerged dry transfer of cargo. UUVs could also serve as stealthy ship-to-shore connectors; inflatable lighters and boats could be used to unload surfaced UUVs at night.
When confronted with anti-submarine attacks a “pod” or convoy of such UUVs could submerge and scatter, increasing the likelihood of at least a portion of their cumulative payload arriving at its destination. Some large UUVs in such a “pod” could carry anti-air and anti-ship armament for defense in place of cargo, but such protection entails larger discussions about armed seaborne drones.
A submarine – even a manned nuclear submarine – is not the platform of choice if speed is essential. Airborne resupply can deliver cargoes much more quickly. But not all cargoes need arrive swiftly. The water may always be more opaque than the sky, and larger payloads can be floated than flown. It remains to be seen if large stealthy unmanned transport aircraft can be developed.
While these notions seem fanciful there is nothing about the technology or the concept beyond the current state of the art. Large numbers of unmanned mini-subs could overcome both the capacity and expense limitations that limited the cargo submarine concept in the past. The ability to stealthily supply naval expeditionary forces despite A2/AD opposition would be a powerful force multiplier.
Steve Weintz is a freelance journalist and screenwriter who has written for War is Boring, io9 and other publications.
To start our UUV Week, we’re talking with Chris Rawley, owner of the website Naval Drones: Unmanned Naval Systems and author of Unconventional Warfare 2.0. Chris is a surface warfare officer in the US Navy Reserve.
Penguins: they love UUVs. NSF-funded SeaBED shown.
SD:Thanks for talking with us today, Chris. Let’s get right to it with some initial broad strokes. There’s clearly a great deal of potential out there for UUV platforms, but in a very general sense, what mission areas of those set out by the US Navy’s UUV Master Plan show the most promise in terms of cost effectiveness and practicality?
CR: Thanks Sally. Before I start, I have to provide the disclaimer that I am speaking here in my personal capacity and my comments and opinions do not reflect U.S. Navy or DoD policy. Also, I am by no means an expert in this field, though I have picked up some knowledge the past few of years writing for “Naval Drones,” which was initially established as a marketing tool for a UUV concept I developed. After some fits and starts, my company is currently working on this UUV design with a prototyping firm.
From my perspective, mine countermeasures is the mission area ripest for disruption by unmanned undersea vehicles. As CIMSEC’s readers know, mine clearance involves a painstaking, methodical process of hunting to rule out false positives detected by various sensors or using sweeping gear to activate the mines. Dedicated mine countermeasures ships, though still in service, will eventually be replaced multi-mission platforms embarking UUVs. Most readers know about the Littoral Combat Ship’s dedicated mine countermeasures payload, but pretty much any naval combatant or auxiliary with a margin of payload capacity such as the JHSV can launch UUVs or carry boats or unmanned surface vessels (USVs) that can launch UUVs directly into a mine field at a safe stand-off distance from the mother ship . Multiple UUVs operating together will eventually become faster at mine hunting than dedicated surface ships with sweeping gear or mine-detection sonars. ROVs and UUVs such as the SeaFox can also localize, identify, and neutralize the mines. Though I think the UUV Master plan specifically mentions nine mission areas, besides MCM, at some point UUVs will play a part in pretty much any kind of naval operation one could imagine.
While we continue to wait for the silver bullet of long-endurance propulsion systems, the three areas of UUV development with the most potential I see are payload miniaturization, payload modularity, and swarming algorithms.
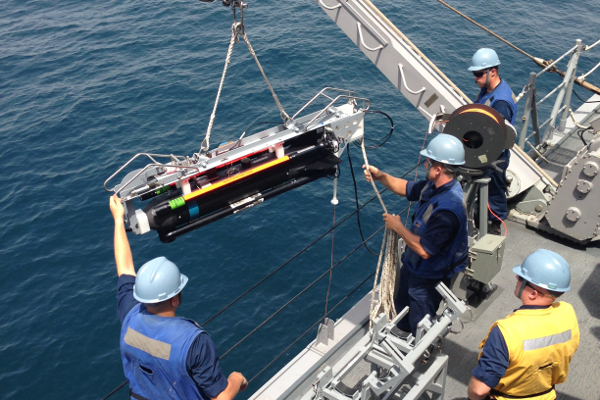
USN sailors load a SeaFox MCM UUV (U.S. Navy photo by Lt. Colby Drake/Released)
SD: Let’s talk specifically about UUVs in an ASW capacity. A lot of readers (okay, especially me) are interested in what UUVs can bring to anti-submarine warfare (ASW). In all likelihood, such a platform would need to detect low-frequency signals, demanding a large array and a vehicle to support it. Will there have to be a trade off between the reasonable size of a notional platform (to support such an array) and such a platform’s detection capabilities? Are leave-behind arrays delivered as part of a UUV payload a more desirable option?
CR: Autonomous underwater vehicles such as gliders are already helping to characterize the water column, which as you know is one of the most important foundations of ASW. As far as sub-hunting goes, a large UUV towing a passive array might be one way to do it, though I’m not sure that is feasible for a variety of reasons. Or as you’ve alluded to, a larger UUV could basically become a means to more precisely deploy sonobuoys or emplace arrays on the bottom. What about smaller, more numerous UUVs each carrying a single hydrophone and operating at different depths? Or UUVs able to surface and act as non-acoustic data relays between bottom arrays and ASW aircraft? I think there is certainly room for some R&D and experimentation in this area.
SD:The idea of an UUV with the capacity to surface and communicate as a non-acoustic data relay with an MPRA asset is particularly promising and offers a solution to some of the major complexities of airborne prosecutions. Further, the idea of employing UUVs to deploy hydrophones or arrays at specific depths is a novel turn on a well-established technique. But perhaps getting those assets on-station at the appropriate times would present a difficulty; after all, one of MPRA/airborne ASW’s major advantages is speed and flexibility relative to the target. On to another ASW question: in an increasingly crowded underwater environment, do you think that submarine-launched UUVs will offer more or less stealth to launching platforms? Do you see any applicability for UUVs as a decoy, or would maintaining acoustic superiority for existing and future subs prove a more worthwhile, cost-effective pursuit?
CR: Unlike a sub-fired missile, I’m not sure a UUV will make a launching submarine any less stealthy. To my knowledge, most of the UUVs that have been tested have been “swim out,” so they wouldn’t add much extra acoustic signature to the launch platform. Some sort of acoustic or magnetic decoy UUV does seem like a viable and useful payload for a submarine.
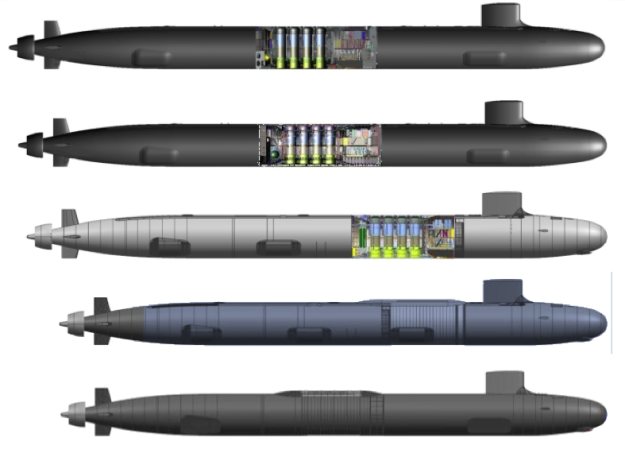
SD:U.S. Submarine-launched UUVs may have somewhat of a compatibility crisis in the coming decades. SSGNs are uniquely suited for UUV operations, but as modified-Ohio class platforms reach the end of their service life in the coming decades, how do you think UUV platforms will fit into the Virginia Payload Module program?
A Naval Sea Systems Command illustration depicting the VPM concept.
CR: Though launching and recovering a UUV from a submarine certainly adds an element of “stealthiness” for the UUVs themselves, it also comes with several complications. There are trade-offs in a submarine’s limited tube space – be it torpedo tubes or the VPM – between UUVs and other payloads such as torpedoes and missiles. Moreover, as you note, more submersible vehicles will result in an increasingly crowded operating environment. A manned submarine operating in conjunction with a large number of friendly (and potentially, enemy) UUVs makes waterspace deconfliction challenging and puts a capital ship at risk for a collision, especially as the size and speed of UUVs grows.
But here’s the thing: a UUV is inherently stealthy. Why do we need to launch it from another low signature platform (a submarine) when it can be launched more cheaply and across wider areas (such as shallow water littorals) by more numerous surface vessels or even air platforms? Where there is no other way to get a shorter ranged UUV into the water column, a submarine may be the answer. To answer your question, we should save limited submarine payload capacity for offensive weapons and insert the majority of UUVs into the battlespace using more affordable means.
SD:Interesting points. I hadn’t considered the idea of mutual interference, and it certainly makes sense to deploy UUV assets from surface or air assets, where space would not be as much of a premium. This is another broad question, but what role do you see for UUVs in developing a cogent strategy to counter A2AD?
CR: UUVs could potentially serve as fire control sensors, decoys, and deception tools during a counter-A2AD campaign. I’ll leave it at that.
SD:Fair enough. One of the most frequently cited criticisms of developing UUV platforms is the inherent difficulty of communication and navigation in an underwater environment, as well as limitations on data links and processing. What is your answer to these criticisms?
CR: The easiest solution is the surface the UUV every now and then to transmit its data and get its bearings. But advances in underwater data modems (both acoustic and non-acoustic), along with autonomy will mitigate some of these challenges
SD: If operating covertly in a denied area, surfacing might be detrimental to the UUVs mission, but no more so than other subsurface assets that might be required to surface to receive or transmit data. But, admittedly, this is a pretty narrow scope to view a very broad potential mission set, and such a concern would not apply to all those potential applications. Let’s talk autonomous vehicles. AUVs operating at a distance will undoubtedly carry the potential for loss or interception. Is there an acceptable level of platform loss or risk operators of UUVs will have to accept?
CR: Sure. I think we will need a variety of UUV types. Some, like Large Displacement Unmanned Underwater Vehicle (LDUUV), will be large, expensive, and multipurpose. Others will be designed to be single-purpose, affordable, and expendable, while some others will be somewhere in the middle.
SD:Specifically though, do you think that there might be inherent risks to doing business via UUVs that do not exist for manned counterparts? Not necessarily that these risks outweigh the benefits, but, if there are any, they’re worth discussing.
CR: Signal interception is a problem faced with pretty much any platform these days. Even manned aircraft are going to be hard pressed to operate without emissions given how networked everything is. Many UUV atmospheric signals will be on commercial channels, so hard to differentiate from civilian traffic. As to the technology being recovered by an enemy, that is certainly possible too, and a much higher risk for unmanned vehicles. We’ve learned lessons from UAVs that are applicable in this area.
SD:Great point; the risk for signal interception would likely not be any greater for unmanned platforms, and could be mitigated in similar ways. Let’s scale down a bit. On your blog, you recently discussed possible applications of small-scale UUVs, such as those fielded by the University of Graz’s Collective Cognitive Robots project. What applications do you envision for small-scale UUVs like these operationally?
CR: Search and recovery, especially in inshore waters or the littorals, comes to mind. But also acoustic decoys, and maybe even small, mobile sonobuoys for ASW. I’d love to get some reader feedback on this one actually.
SD:I really look forward to reading what others have to say on this issue as well. I think the MPRA ASW applications are especially promising. Last but certainly not least, let’s discuss the LDUUV program. What is your take on pier-launched or even surface-ship based systems with longer endurance and on-station capabilities?
The U.S. Navy’s LDUUV
CR: For some applications, a pier-launched UUV might be viable. But a Navy’s strength is based on its mobility. So yes, as we seem to agree, surface ships are a pretty viable launch platform for large UUVs. The Naval Special Warfare Command’s Swimmer Delivery Vehicle is an analogy. Of course, they are most stealthy when operated from a submarine, but can also be launched from ships and smaller combatant craft. And depending on the operational range of the LDUUV, surface ships would be fine for many mission profiles. And if you are looking for stealth, the stealthiest platform is the one that hides in plain sight, so not every launch platform has to be a naval vessel.
SD: This has been tremendously interesting discussion! Thank you, Chris, for your time; congratulations on your progress with your own UUV design. We look forward to following its development! Thanks as well to the CIMSEC readers who have followed along. Let’s continue this discussion in the comments section.