CDA Institute guest contributor Tom Ring, a Senior Fellow at uOttawa’s Graduate School of Public and International Affairs, comments on some of the challenges facing the National Shipbuilding Procurement Strategy.
With some observers and pundits clamouring for the National Shipbuilding Procurement Strategy to be completely scrapped, we should take the time to examine where we are and indeed whether the program is failing to meet its objectives. In a detailed analysis recently published by the Canadian Global Affairs Institute, the conclusion reached tells a very different story. This blog post provides a short summary of the issues that I explored more fully in the above paper, and concludes with identification of some of the very real challenges involved in implementing such a complex undertaking.
In 2006, the federal Government made a bold strategic decision – it would use the renewal of the Navy and Coast Guard fleets to rebuild Canada’s shipbuilding industry. The concept became the National Shipbuilding Procurement Strategy (NSPS). The economic benefits of this construction would accrue not only to the shipyards which eventually won the bidding process. Ancillary benefits would also be received by the hundreds and thousands of suppliers in this decades-long, multibillion dollar commitment.
Rather than the well-trodden practice of shipyards bidding on a project-by-project basis, they would bid on the entire package, one for the combat package, the other for the non-combat package. There would be two winners among Canada’s five shipyards capable of doing this work, meaning that there would be three losers. This was not how shipbuilding procurement had ever been done.
Much has been written recently about the NSPS, not all of which has been favourable. To be sure, any initiative that has the goals and ambitions of the NSPS will be (and ought to be) subject to considerable scrutiny. Healthy public debate on matters of important public policy is vital to democracy. Differing points of view and outright opposition should be a welcome part of a debate on an issue as important as the NSPS. Let me briefly outline the original goals of NSPS and assess where we are in achieving them.
Goal 1 – Rebuild the Federal Vessels in Canada: This is currently being accomplished. While it has been suggested that the ships can be built cheaper elsewhere, no evidence has ever been provided to substantiate this assertion.
Goal 2 – Revitalize the Shipbuilding Industry in Canada: This has been accomplished and the resulting job creation and associated economic benefits are being felt across Canada and will continue to be for some time to come.
Goal 3 – Build The Federal Vessels in a Manner that Maximizes Value for Taxpayers and Fosters Economies of Scale: This goal is perhaps one of the more contentious elements of NSPS, in so far as it implies acceptance by the Government of a “premium” for building vessels in Canada. There is likely no counter argument to the fact that shipyards in Canada cannot match the low labour rates charged by shipyards in Asia. However, for most Canadians, it is also likely a common sense proposition that if we need to invest $30–50 billion to rebuild the Navy and the Coast Guard we should do so in Canada – as long as we do it in such a way as to maximize productivity and efficiency. This is why Canada engaged First Marine International (FMI), the recognized world leader in assessing shipbuilding processes. Measuring over 183 different processes, FMI established efficiency and productivity standards for the winning shipyards, based on leading practices world-wide. Any contract to be subsequently awarded is conditional on these standards being maintained. We are only able to assess achievement of this goal after the two shipyards achieve their “target state” as established by FMI, and subsequently verified by them as required by the Umbrella Agreement (UA). If one assumes that target state will be reached, then FMI has stated that the facilities will be a significant national strategic asset. The resulting economic impact for Canada in the long-term will not be only jobs created, but careers created that will last for decades.
Goal 4 – Establish a Long Term Strategic Relationship with Two Shipyards: The elements of this arrangement are set out in the two partnership agreements called Umbrella Agreements, and include all of the provisions needed to permit value for money assessments, open book accounting, risk sharing, cost/capability trade-offs, etc.
Goal 5 – Realization of the Shipyards Commitments on ITB’s and Value Proposition: The achievement of this goal will require continuous assessment but there is no evidence to date that this will not happen.
There are, nonetheless, some very real and problematic challenges to be addressed and, to date, real solutions have not yet been identified. The first of these is the acknowledged inadequacies of the project budgets. The second is the ongoing challenge of program management for a multi-billion dollar endeavour. Neither is new nor unexpected.
The risk that intended capabilities might not be achieved within the established project budgets was identified by officials involved in implementing NSPS even before the shipyard selection process began. Officials with the Department of National Defence (DND) and Department of Fisheries and Oceans (DFO) and well as at Public Works and Government Services Canada (now renamed Public Services and Procurement Canada) knew that most of the project budgets had been developed many years earlier and needed updating to reflect cost escalation, technology improvements, and new capability requirements. However, given the delays incurred due to the failed vessel procurement processes, and having nothing better to inform the new budget numbers before design work was well underway, it was decided to proceed with the overall program of work knowing that budgets would have to be re-visited at the design stage in any event.
In his 2013 assessment of the NSPS, the Auditor General noted that inadequate project budgets could constrain the achievement of required capabilities. No specific action was taken to address the observation. Cost estimation on projects that will be realized many years in the future is an imprecise undertaking, to say the least. Of course, every effort is made to account for inflation, currency fluctuations, and other known variables. Nevertheless, some factors cannot be fully accounted for. Innovation, advances in technology, and adjusted requirements due to new threats and changing circumstances will always have an unknown impact on a project that will only be realized in 10 years.
Still, the recent Australian Defence white paper estimated the cost of nine future frigates, to be built in the 2020 timeframe, at more than AUS$30 billion. And this number is for design and construction only, and does not include costs for weapon systems, or project management costs etc. Of course, there is no way of knowing whether Canada’s future naval vessels will be similar but the broad range of numbers provided by the Australian government should be instructive to those who are making similar estimations in Canada.
The second issue is the ongoing management of the program. This is also a critical shortcoming. If not addressed adequately, it will continue to hamper the achievement of the overarching goals and objectives of NSPS. Much like the issue of inadequate project budgets, the ongoing management of NSPS implementation was identified as a significant vulnerability in the fall of 2011, shortly after the selection process was completed. The challenge identified at the time was how to ensure that the entire implementation of NSPS was managed as one program and not a series of related projects. PricewaterhouseCoopers (PwC) was engaged in late 2011 to conduct a review and make recommendations on the “most appropriate governance and operating model to manage the Umbrella Agreements and long term sourcing relationships that have been created by the NSPS process.” PwC’s recommendations were never fully implemented.
The major criticisms of the NSPS are well known. The various vessel construction projects are over budget and have yet to be delivered. (It should be noted that construction is well underway on vessels in both packages, and construction on the second vessel in the non-combat package began on March 29th at Seaspan in Vancouver.) Has the Government maintained sufficient control/authority in the UA for its partnership arrangement with the shipyards? Does the UA sufficiently protect the Crown’s interests? Whether such concerns are real or could now be mitigated if they are real, is a question that deserves to be continually examined given the size, scope, and complexity of the program to re-build the federal fleets. In order to contribute to the public debate, I will more fully explore the nature of the challenges outlined above and discuss options for dealing with them in a policy brief in the coming weeks.
Tom Ring is a Senior Fellow at the Graduate School of Public and International Affairs at the University of Ottawa. He retired from the Public Service in January 2015 following a 39 year career, the last five of which were as the Assistant Deputy Minister of the Acquisitions Branch at Public Works and Government Services Canada. In that role he was responsible for the implementation of the selection process for the National Shipbuilding Procurement Strategy. (Image courtesy of The Canadian Press/Andrew Vaughan.)
This series on the leading maritime militias of Hainan Province began by examining the “rights protection” efforts of Sanya City’s maritime militia, whose exploits have given them a prominent position among the province’s irregular sea forces. Discussions about the Sanya City maritime militia are still ongoing as we watch their development. Next came our evaluation of the historical legacy of Danzhou’s maritime militia, which directly demonstrated the value of irregular forces in naval warfare during the 1974 Paracels Sea Battle. This third installment in the series is part one of a two-part in-depth look at the maritime militia of Tanmen.
Tanmen Fishing Harbor is a small fishing port on the eastern shore of Hainan Island. It is home to one of China’s best-known maritime militia units, the Tanmen Maritime Militia Company (潭门海上民兵连). This irregular force receives disproportionate media coveragestemming largely from its involvement in numerous incidents with foreign actors at sea, most notably the April 2012 Scarborough Shoal Incident between the People’s Republic of China (PRC) and the Philippines. Since its founding in 1985, Tanmen has received numerous accolades as an “advanced militia unit” from the government and military on all levels. Tanmen’s fame spread further after Chinese President Xi Jinping’s high-profile visit on the first anniversary of the incident. Xi encouraged Tanmen’s maritime militia to build larger vessels, collect information in distant waters, master modern equipment, and support “island and reef” development. The extent of Chinese attention to this fishing village merits a deep-dive analysis to determine what is happening on the ground there, and what kind of maritime militia capabilities are resulting.
Some of Tanmen’s importance to the PRC stems from the wealth of historical artifacts and other evidence China possesses that allegedly support claims that Tanmen fishermen were the earliest community to discover and sustain continuous exploitation of the Paracel and Spratly Islands. Numerous reports of Tanmen fishermen having been detained or attacked by foreign states also support a growing Chinese narrative of the victimization of Chinese fishermen in the South China Sea. This narrative justifies enhanced ‘defensive’ activities by Chinese maritime forces operating there. Contributions from fishing communities such as Tanmen’s to China’s overall posture in the South China Sea bolsters domestic Chinese rationale for regaining lost “blue territory” (蓝色国土) and “maritime rights and interests” (海洋权益). Tanmen Village is likewise the future site of China’s South China Sea Museum and the South China Sea Base for the State Administration of Cultural Heritage’s Undersea Cultural Heritage Protection Center. Both institutions will likely be dedicated to bolstering China’s historical evidence to support its claims of sovereignty over the islands of the South China Sea and resource rights in those waters. The latter also has a stated purpose of “promoting maritime industries, shoreline protection and development, utilization and conservation of marine resources, marine service systems, and the implementation of the overall national marine economic development strategy.”
Central to furthering these interests are irregular units including the Tanmen Maritime Militia Company. Its history exhibit, located in its headquarters, houses artifacts documenting historical presence in the South China Sea by the forefathers of present-day militia members. These include navigation logs, compasses, and diving gear. Tanmen’s maritime militia activities began well before the present company’s official establishment in 1985. Previously a more loosely-organized fishermen militia, it became an official militia company when the PRC promulgated new guidelines for developing fisheries in distant waters and opened up the oceanic fishing industry to privatization. A contingent from this new organization was led initially by its first commander, Huang Xunmian, to the Spratlys, thereby becoming the first organized Tanmen fleet for Spratly development. Huang became a major part of the militia movement to mobilize Tanmen fishermen to build bigger vessels and venture to the Spratlys. By the early 1990s, the company included 150 militiamen and 21 vessels. Today it continues to expand under the current political agenda of transforming China into a “maritime power.”
Chinese media coverage of Tanmen fishermen often states that a large portion of incidents in the South China Sea between Chinese fishermen and foreign states is attributable to the Tanmen fishermen and maritime militia, whose members resolutely oppose “foreign encroachment.” The deputy station chief of the Qionghai City Fisheries Management Station toldreporters in 2012 that 90% of the Chinese fishing vessels visiting the Paracels and Spratlys are from Tanmen Harbor, the remainder from Sanya City (also in Hainan Province) or Guangdong Province. While that particular claim is difficult to verify, the number of tense encounters between Tanmen fishermen and militia and the maritime forces of other South China Sea states—particularly the Philippines—certainly helps illustrate the point. Below is a brief, non-exhaustive list of events within the past three decades involving Tanmen fishing vessels, documenting their constant presence and activities in disputed waters and the resulting encounters, and periodic altercations, with other claimant states’ maritime forces. Of note, the incidents listed are as reported in the Chinese press. Instances of provocations by Tanmen fishermen or Chinese law enforcement vessels are therefore not included.
Timeline: Incidents and Other Events involving Tanmen Fishermen/Maritime Militia
Based on accumulated reports on Tanmen fishing vessels, the below list is by no means complete. Chinese media often reports that hundreds of incidents have occurred.
1985, August – First Tanmen maritime militia trip to Spratlys
After the founding of the militia company in August 1985 and the relaxing of China’s fisheries policies, company leader Huang Xunmian (黄循绵) led a group of 100 fishermen on five fishing vessels on their first trip to the Spratlys.
1989, 13 April – Near Philippine-occupied Thitu Island (中业岛):
Fishing vessel Qionghai 00224 and three fishermen—Huang Changbiao (黄昌标), Yu Yeyou (郁业友), and Yu Yexuan (郁业轩)—are arrested by Philippine authorities.
A number of Tanmen maritime militia work in coordination with the PLA over the years on multiple-month trips to erect the first generation of structures on Chinese-occupied Spratly features. These included stilted shacks, sovereignty markers, piers, and helipads.
Qionghai 00417 is attacked by non-uniformed armed men, resulting in the deaths of four Tanmen fishermen. Tanmen fisherman Hu Xingliang (胡兴良) reported that they were speaking Tagalog, the language of the Phillipines.
Four of the Tanmen Maritime Militia Company’s fishing vessels with 62 fishermen aboard, working near Mischief Reef, are arrested by Philippine authorities. Platoon leader Wang Qiongfa (王琼法) and four other militia members maintain group solidarity despite strong Philippine attempts to coerce confessions from the Chinese fishermen to violating Philippine waters.
Tanmen Maritime Militia squad leader Chen Zebo (陈则波), captain of Qionghai 00372, and Tanmen fishing vessel Qionghai 00473 and its captain Chen Yiping (陈奕平) (altogether 22 fishermen) are arrested by the Philippine Navy for poaching, sent to Subic Bay Coast Guard Station, and held there for 5-6 months.
Trawlers Zhongyuanyu (中远渔) 313 and 311, and their ~29 fishermen, are detained by a Philippine naval patrol for possession of explosives and endangered coral.
Chen Zebo’s ship is rammed and sunk by the Philippine Navy, sending 11 crewmembers into the water. Chen and two others are picked up and sent to jail, subsequently released in July.
Tanmen fishing vessel Qionghai 01068 encounters a Philippine Coast Guard Vessel. Philippine Coast Guard fires on Qionghai 01068, killing captain Fu Gongwu (符功武); and detains the rest of the crew.
Chen Zebo’s nephew Chen Yichao (陈奕超) was on Qionghai 03012 in the Spratlys at South Shoal when on 26 April 2006 an armed vessel of unknown origin attacked and killed four fishermen and injured 3 more.
12 Tanmen fishing boats at Scarborough Shoal encounter Philippine Naval Vessel Gregorio Del Pilar. Six fishing vessels were outside the lagoon at the time, including that of Tanmen Maritime Militia Company Deputy Commander Wang Shumao (王书茂), who led an unsuccessful effort to block Philippine fishing vessels from approaching the shoal.
The other six fishing vessels present inside the lagoon, two of which are confirmed maritime militia vessels, were trapped when Philippine forces blocked the lagoon’s opening. These boats were subsequently boarded by Philippine troops:
Qionghai 03026 – One of two boats present under the direct command of Tanmen Militia Squad Leader Chen Zebo. Returned to Scarborough Shoal after initial standoff.
Qionghai 09099 – Under direct command of Tanmen Militia Squad Leader Xu Detan (许德谭). Returned to Scarborough Shoal after initial standoff.
Qionghai 02096 – Owned by Yu Ning (郁宁), Captain is Li Chengduan (李成端), Yu reported the incident to the Tanmen Border Defense Station.
Qionghai 03065 – Owned by Zhao Xuxian (赵绪贤); Zhao Shisong (赵市松) is captain. Returned to Scarborough Shoal after initial standoff.
Qionghai 05668 – A 300-ton vessel owned by Fu Mingyan (符名燕), its captain is Li Qiongmei (李琼美). Ship had 16 crewmen, 12 conducting underwater clam harvest. Returned to Scarborough Shoal after initial standoff. Qionghai 03889 – Captain is Chen Yiping (陈奕平), (also detained in 1998). Returned to Scarborough Shoal after initial standoff.
Possible maritime militia vessel Qionghai 02067 is hired to carry “official” engineering surveyors and stone boundary markers to Triton Island. Media coverage states that crew members were skittish during the Chinese journalist’s inquiry.
Two Tanmen fishing vessels are caught by Philippine personnel poaching endangered turtles near Half Moon Shoal on 6 May 2014. One of the fishing vessels, Qionghai 03168, escaped; Qionghai 09063 and 11 fishermen are detained by Philippine coast guardsmen reportedly disguised as fishermen. Orders were sent via the Beidou system to fishing vessels Qionghai 03168 and Qionghai 05067 to return to the area of last contact to conduct a search. China Coast Guard vessel 3102 was alsorecalled from its task of blockading Second Thomas Shoal to assist with the search.
While numerous open sources confirm the Tanmen Maritime Militia clearly exists and operates in the South China Sea, it is sometimes difficult to ascertain which of Tanmen’s fishing vessels are part of the militia and which are not. One incident on 25 May 2000, wherein a Tanmen fishing boat captain was shot and killed, yielded contradictory Chinese and Filipino narratives. Tanmen fishing vessel Qionghai 01068 was operating off the coast of Palawan when it encountered a Philippine Coast Guard Vessel. Chinese newscoverage portrays Philippine thugs firing upon hapless Tanmen fishermen who drifted into Philippine waters after suffering engine failure. Philippine sources, however, assert that the Chinese fishermen were poaching inside Philippine waters (reported coordinates here) and catching endangered turtle species, an activity for which Tanmen fishermen are well-known. The fishing boat fled as the Philippine Coast Guard vessel approached. When the coast guard vessel fired warning shots to halt them, the fishermen reportedly fired back, sparking a firefight. With the captain dead at the helm, Qionghai 01068 came to a stop. Philippine police suspect the fishermen tossed their weapons into the water before the coast guard boarded. Previously-documented activities by the maritime militia in Tanmen and other areas of Hainan Province suggests that Chinese reports tend to omit important details to present an image of defensive victimization. Such discrepancies make it difficult for observers to separate truth from fiction as each claimant pursues its own interests in making its statements. This article’s scope primarily covers Chinese source materials on Tanmen Township (潭门镇)’s maritime militia; contradicting reports from other South China Sea claimant states merit further comparative research.
Ambiguity surrounding the identity of fishermen-based militia is a veil of protection often exploited by the PRC as it advances its maritime claims in the South China Sea. Even with proof of a boat’s connection to the militia, that force’s part-time nature means that most of the time personnel are non-uniformed and engaged in economic production. Nevertheless, domestic Chinese-language sources sometimes reveal the true identity of the maritime militia, clarifying a fishing vessel’s background. However, as the 10 April 2012 Scarborough Shoal incident makes clear, even when Tanmen fishing vessels may be operating for private gain, they can be quickly transformed into instruments of state policy when the situation calls for it.
The Scarborough Shoal event was the Tanmen militia’s most notable recent encounter and was likely the impetus behind President Xi Jinping’s widely reported visit to the unit. As outlined in the timeline above, twelve Tanmen fishing boats were operating at Scarborough Shoal, six inside the lagoon. The six were boarded by sailors from Philippine Navy vessel BRP Gregorio Del Pilar, who inspected their catches and took photographs. It also appears that Philippine forces’ protocol upon boarding a Chinese fishing vessel is to shut off the vessel’s communications equipment, including the Beidou satellite navigation terminal, as they did upon boarding Qionghai 09063 on 6 May 2014. Chinese Maritime Law Enforcement (MLE) forces have difficulty interfering in Philippine inspections and arrests of fishermen if they cannot use the Beidou’s transmitter to locate the boarded vessel. Fortunately for Tanmen’s fishermen caught in the Scarborough Shoal lagoon, before Philippine sailors could stop him, Yu Ning (郁宁), owner of Qionghai 02096, was able to transmit several short messagesto the phone of Fu Shibao (符史宝), the attendant at the Tanmen Village Border Defense Control Station’s command office. He did so by using the Beidou message transmission service, which can send messages directly to Fu’s phone. Upon receiving the messages “Philippine naval vessel No. 15 inbound,” Fu and his superior verified the reported vessel as the BRP Gregorio Del Pilar. Yu’s final message, “They are boarding,” prompted Fu to rapidly elevate the report to MLE authorities. China Maritime Surveillance ships CMS 75 and CMS 84 were dispatched to the shoal to intervene, arriving that afternoon. China Fisheries Law Enforcement ship YZ 303 left its mission at Mischief Reef to go full steam to Scarborough Shoal, arriving on 11 April.Fisheries cutter YZ 310 also left Guangzhou harbor on 18 April to arrive at Scarborough Shoal on the 20th.
A reporton the Qionghai City Government website features a profile of the Tanmen Maritime Militia Company Deputy Commander Wang Shumao (王书茂). It contains a description of his actions to support the 2012 Scarborough Shoal Incident. It appears that he was in command of the twelve Tanmen fishing vessels present during the incident, as he led an effort outside of the shoal to block any Philippine fishing vessels from entering the area. The article states that those Philippine fishing vessels were attempting to cross China’s “sea area defense line” (海域防护线), and that other Chinese fishing vessels in the area stopped fishing and joined in the rights protection force. The struggle continued until the 14th, when the remaining fishing vessels left the lagoon under escort by the law enforcement vessels. Some of the fishing vessels returned to Tanmen Harbor, while others continued on to operate in the Paracels.
However, just days after leaving the shoal, some of the Tanmen fishing vessels received notice from the Tanmen Fisheries Law Enforcement Department that it was again safe to operate at Scarborough Shoal. Having sustained economic losses from the incident, several of the Tanmen fishing vessels that had left quickly made the 500-mile journey to fish again at the shoal. This includes Qionghai 09099 and Qionghai 03026, whose captains are maritime militia squad leaders. That the identities of the fishermen are confirmed as maritime militia squad leaders who had been present inside the lagoon during the Scarborough Shoal Standoff and the militia company’s deputy commander operating outside the lagoon suggests that the Tanmen fishing vessels present at the shoal at some point became state-sponsored forces for China’s rights protection action at Scarborough Shoal. Additionally, under orders from shore command, Fisheries Law Enforcement vessel YZ 310 shared its own fuel with the fishing vessels for the stated purpose of maintaining their presence at Scarborough Shoal. By 25 April, eight Tanmen fishing vessels had returned to Scarborough Shoal. It is unclear whether the other vessels that returned, such as Qionghai 03065 and Qionghai 05668, are members of the Tanmen Maritime Militia. Balancing profitability and risk are normal considerations for regular fishermen. However, the tense incident at Scarborough Shoal, and the fact that these same fishermen were boarded days earlier at that shoal by armed commandos from the flagship of the Philippine Navy, renders unlikely the proposition of the Tanmen fishermen returning to the shoal out of concerns for economic profit.
11 April 2012: Fishing vessel Qionghai 09099, a confirmed maritime militia vessel operated by squad leader Xu Detan (center-front) and present at the Scarborough Shoal Standoff, is shown here detained by Philippine authorities for poaching giant clams.
One report from the Qionghai City Development Research Association covered an event held to commemorate the Tanmen fishermen’s contribution to “rights protection” at Scarborough Shoal. In attendance were Qionghai City’s officials and ten “fishermen representatives.” The report states that after the standoff began at Scarborough Shoal, Tanmen Township dispatched 25 fishing vessels in four groups to the shoal in response to a request from “higher national authorities.” Coverage of the event cited their bravery and obedience to commands while executing their mission to fish at Scarborough Shoal during the incident. Qionghai City officials then awarded the ten representatives with “consolation money” (慰问金), presumably meant to reimburse them for the costs of conducting their rights protection mission. It is thus clear that Tanmen fishermen were mobilized, possibly by central government authorities, to support China’s rights protection action at Scarborough Shoal.
23 August 2012: Qionghai City leaders hold an award ceremony for “fishermen representatives” who participated in the rights protection action at Scarborough Shoal. Banner reads “Consolation Forum by Qionghai City Government for Fishermen that went to Huangyan Dao (Scarborough Shoal) for Rights Protection.” Tanmen “fishermen representatives” received “consolation money” for executing the missions assigned to them during the Scarborough Shoal Incident in April 2012.
Political Pilgrimage Begins…
The successful role of the Tanmen Militia in the Scarborough Shoal Incident resulted in visits by numerous delegations to Tanmen, where militia representatives urged others to emulate their example or to learn from their experiences. Some of this attention advances local economic development, but a greater focus is in the stated objective of protecting China’s sovereign rights and supporting “island” construction in the South China Sea. Although some visits predated Xi Jinping’s, it was his visit in 2013 that put Tanmen’s irregular sea forces on the national map.
Xi Jinping’s visit to the Tanmen Maritime Militia Company was a symbolic gesture that catalyzed growth in maritime militia work nationwide. In the fashion of many Chinese political-economic endeavors, a model unit and locality were selected for all others to learn from and to emulate. The only thing needed was Xi’s stamp of approval to make it official.
Hainan Provincial Party Secretary Luo Baoming and Deputy Party Secretary Li Xiansheng helped lay the foundation for Hainan’s maritime militia construction. Luo visited Tanmen Township on 6 December 2012 and Li on 8 March 2013. Luo spoke with the community about the content of decisions by the CPC’s Eighteenth National Congress, explaining how China’s goals to develop marine resources, protect maritime sovereignty, and become a maritime power were good news for Tanmen’s development. The visits also likely helped prepare townspeople for the political movement about to unfold around them.
10 April 2013: Chinese President Xi Jinping made a special trip to Tanmen fishing harbor during his tour of Hainan Province. This photo shows him inspecting the Tanmen maritime militia. Behind Xi is Hainan Province Deputy Secretary Li Xiansheng, head of the Hainan leading small group tasked with overseeing construction of maritime militia forces, vessels, equipment, infrastructure, and training.
In the aftermath of Xi’s visit, numerous delegations from other areas of the province made trips to Tanmen’s fishing harbor to learn from the “model work unit.” Most delegations held their ceremonial meetings aboard the same maritime militia vessel that Xi boarded, Qionghai 09045. The vessel’s captain, Platoon Leader Lu Chuan’an, appears to have assumed the role of maritime militia representative for the delegations. Below is a selective sampling of the delegations that visited Tanmen Township, ranging from Hainan’s local counties to national-level agencies:
10 October 2012 – Delegation led by Guangzhou Military Region Deputy Chief of Staff.
19 April 2013 – Delegation led by Party Secretary of Wanning City, Hainan Province.
11 July 2013 – Delegation led by head of Hainan Province’s Political and Legal Affairs Commission.
14 October 2013 – Representatives from Baoting County, Hainan Province.
1 November 2013– Delegation led by Party Secretary of Dongfang City, Hainan Province.
15 November 2013 – Delegation led by Sansha City Mayor Xiao Jie. China’s newest city, built on Woody Island in the Paracels, this prefectural-level polity administersall PRC-occupied South China features ex-Hainan.
25 March 2014 – Delegation from Ministry of Human Resources and Social Security.
23 September 2014 – National People’s Congress Special Research Group led by Former Guangzhou Military Region Deputy Commander Lu Dingwen.
17 October 2014 – Research group from Foreign Affairs Committee of the Chinese People’s Political Consultative Conference.
26 March 2015– Hainan Governor Liu Cigui; former director, State Oceanic Administration.
16 April 2015 – Hainan Province, Lin Gao County Committee visit.
3 August 2015– Supervisory group from the National Ministry of Civil Affair’s Double-Support Office, dedicated to the PLA and governments’ mutual efforts to support each other, visits Tanmen and holds a conference in Qionghai.
Most news coverage of these visits showcases the Tanmen Maritime Militia Company as the “first stop.” Many photos in reports of the visit show delegation members visiting the maritime militia headquarters command’s sand table depicting South China Sea geomorphology with markers representing numerous features.
On 23 September 2014, for instance, former Guangzhou Military Region Deputy Commander Lü Dingwen (吕丁文) led a National People’s Congress Special Research Group to survey the Tanmen Maritime Militia Company. With the provincial deputy commander and Qionghai City officials in tow, the delegation followed the usual itinerary for all delegation visits to the Tanmen Maritime Militia. Afterward, it held a conference attended by Qionghai City and Tanmen Township officials, including officials from the City Oceanic and Fisheries Bureau, People’s Armed Forces Department, and fishermen and militia representatives. They discussed issues involving Tanmen fishermen’s income, fuel subsidies, medical insurance, and policy support. The Special Research Group then drafted a feasibility proposal and report for submission to their superiors in Beijing. It appears that Xi’s stamp of approval on Tanmen in particular, and the maritime militia generally, is resulting in research and possible future legislation efforts by the National People’s Congress.
23 September 2014: Former Guangzhou Military Region Deputy Commander Lü Dingwen inspecting the pilot house on one of the Tanmen Maritime Militia vessels.
The period after Xi’s visit saw Qionghai City and Tanmen Township transformed into a hotbed for new discussions on what role the militia should play in China’s effort to become a maritime power. In early 2014 Qionghai City hosted a symposium titled “Maritime Mobilization – 1312” held by the National Defense Mobilization Committee. Representatives from the province’s cities and counties came to discuss maritime militia construction, while units from other areas came to Tanmen Harbor for exercises.
With Xi’s having given the Tanmen Militia his stamp of approval as the model unit to emulate, previously influential but obscure grassroots-level figures, such as Deputy Commander Wang, Platoon Leader Lu Chuan’an, and Squad Leader Chen Zebo, will now feature prominently as exemplars in maritime militia work. Chen Zebo, in particular, has become famous for his aforementioned bravery against Philippine encroachments. He was first detained by Philippine authorities in 1998 when he was fishing at Scarborough Shoal, and reportedly held at Subic Bay for around 6 months. A year later his vessel was rammed and sunk by the Philippine navy, again at Scarborough Shoal. More than a decade later he became famous after he stood up to the Philippine authorities who boarded his boat at the start of the 2012 incident. Today, numerous Chinese news articles extol the Tanmen fishermen’s heroism, often profiling Chen Zebo as the archetype of the Tanmen Militia’s success.
This first part of the Tanmen Maritime Militia portion of our series examined the accumulated incidents and events that eventually put the Tanmen Militia on the radar of Chinese leaders, and its subsequent anointing as a model unit. The next installment in this continuing series on the leading irregular sea forces of Hainan Province (Tanmen Militia deep-dive, part two) will detail how the success of this company continued with its deployment to defend the HYSY 981 drilling rig in contested waters near Triton Island in the Paracels. It will also discuss the Tanmen Militia’s force structure, regulatory tensions, and the militia’s involvement in “island” building in the Spratlys.
Dr. Andrew S. Erickson is a Professor of Strategy in, and a core founding member of, the U.S. Naval War College’s China Maritime Studies Institute. He serves on the Naval War College Review’s Editorial Board. He is an Associate in Research at Harvard University’s John King Fairbank Center for Chinese Studies and an expert contributor to the Wall Street Journal’s China Real Time Report. In 2013, while deployed in the Pacific as a Regional Security Education Program scholar aboard USS Nimitz, he delivered twenty-five hours of presentations. Erickson is the author of Chinese Anti-Ship Ballistic Missile Development (Jamestown Foundation, 2013). He received his Ph.D. from Princeton University. Erickson blogs at www.andrewerickson.comand www.chinasignpost.com. The views expressed here are Erickson’s alone and do not represent the policies or estimates of the U.S. Navy or any other organization of the U.S. government.
Conor Kennedy is a research assistant in the China Maritime Studies Institute at the US Naval War College in Newport, Rhode Island. He received his MA at the Johns Hopkins University – Nanjing University Center for Chinese and American Studies.
Featured Image: Tanmen fishing vessel receiving supplies and fuel from YZ 310 during the Scarborough Shoal Incident. Source: NDD Daily.
The 2nd Annual CIMSEC Forum for Authors and Readers (CFAR) showcased five member-selected contributions from the last year. Authors presented a recap of their articles as well as updates and future predictions. As a newcomer to CIMSEC and the concept of maritime security as a whole, I was most struck by the simultaneous breadth of the topics covered and depth of the members’ expertise. Presentations included analyses of strategy, history, and current events and incorporated a global range of geographic locations. Discussions between authors and members showed the wealth of experience and knowledge that characterizes CIMSEC.
The authors’ presentations were not fixed summaries but instead prompted critical thinking as to how current and past events can shape future maritime developments and strategy. What do the evacuations of civilians from Yemen tell us about foreign naval capacities? Can we predict the future role of the aircraft carrier in the U.S. Navy based on historical debate? As the definition of maritime security evolves, how can U.S. maritime strategy encompass broader threats, like human trafficking and illegal fishing? CFAR enabled these discussions to continue outside of the written articles online and among a diverse group of sailors, academics, and policymakers. As a new CIMSEC member, I look forward to engaging with the community on these critical issues of maritime peace and security. Below are the author presentations.
The speaker lineup at CFAR demonstrates what is special about CIMSEC. None of the presenters are CIMSEC “fellows” or “staff writers,” they are people who sought to use CIMSEC as a platform for their analysis. They respect our top-notch audience and high standard. Anyone has the opportunity to publish with CIMSEC and have the chance to present at CFAR in the future. Interested authors can view the means at their disposal on our Write for CIMSEC page, and reach out to the editorial team at Nextwar@cimsec.org to see what we can accomplish. From the CIMSEC editorial team, thank you to all our readers, writers, and presenters. You are the driving force behind our success.
Kaitlin Sharkey is a defense consultant and CIMSEC Associate Editor. She holds a Master of Global Policy Studies from The University of Texas at Austin.
The following is a two-part series on how the U.S. might better utilize cyberspace and information operations as a Third Offset. Part I will evaluate current offset proposals and explores the strategic context. Part II will provide specific cyber/IO operations and lines of effort.
By Jake Bebber
“It is better by noble boldness to run the risk of being subject to half of the evils we anticipate than to remain in cowardly listlessness for fear of what might happen.”
-Herodotus, The Histories
Introduction
In 2014, then Secretary of Defense Hagel established theDefense Innovation Initiative, better known as the Third Offset, which is charged with recommending ways to sustain American military superiority in the face of growing capabilities fielded by powers such as Russia and China.[i] The purpose of the Third Offset is to “pursue innovative ways to sustain and advance our military superiority” and to “find new and creative ways to sustain, and in some cases expand, our advantages even as we deal with more limited resources.” He pointed to recent historical challenges posed by the Soviets in the 1970’s which led to the development of “networked precision strike, stealth and surveillance for conventional forces.” Centrally-controlled, inefficient Soviet industries could not match the U.S. technological advantage, and their efforts to do so weakened the Soviet economy, contributing to its collapse.
Today, China represents the most significant long-term threat to America and will be the focus here.A number of leading organizations, both within and outside government, have put forward recommendations for a Third Offset. However, these strategies have sought to maintain or widen perceived U.S. advantages in military capabilities rather than target China’s critical vulnerabilities. More importantly, these strategies are predicated on merely affecting China’s decision calculus on whether to use force to achieve its strategic aims – i.e., centered around avoiding war between the U.S. and China. This misunderstands China’s approach and strategy. China seeks to win without fighting, so the real danger is not that America will find itself in a war with China, but that America will find itself the loser without a shot being fired. This paper proposes a Cyberspace-IO Offset strategy directly attacking China’s critical vulnerability: its domestic information control system. By challenging and ultimately holding at risk China’s information control infrastructure, the U.S. can effectively offset China’s advantages and preserve America’s status as the regional security guarantor in Asia.
All effective strategies target the adversary’s center of gravity (COG), or basis of power. “Offset strategies” are those options that are especially efficient because they target an adversary’s critical vulnerabilities, while building on U.S. strengths, to “offset” the opponent’s advantages. Ideally, such strategies are difficult for an adversary to counter because they are constrained by their political system and economy. Today, China’s COG is the Chinese Communist Party (CCP). The stability of this system depends greatly on the ability of the Chinese regime to control information both within China, and between China and the outside. Without this control, opposition groups, minority groups, and factions within the CCP itself could organize more effectively and would have greater situational awareness for taking action. Thus, information control is potentially a critical Chinese vulnerability. If the United States can target the ability of the Chinese regime to control information, it could gain an efficient means to offset Chinese power. This offset strategy, using cyberspace and other information operations (IO) capabilities, should aim to counter China during the critical window in the next ten to twenty years when Chinese economic and military power will surge, and then subside as demographic, economic and social factors limit its growth.
Targeting the CCP’s ability to control information can be considered a long-term IO campaign with options to operate across the spectrum of conflict: peacetime diplomacy and battlespace preparation; limited conflict; and, if deterrence fails, full-scale military operations. The goal is to ensure that PRC leaders believe that, as conflict escalates, they will increasingly lose their ability to control information within China and from outside, in part because the U.S. would be prepared to use more drastic measures to impede it.
This strategy is most efficient because it serves as an organizing concept for cyber options targeted against China that would otherwise be developed piecemeal. It could serve as a means to prioritize research and development, and better link military planning for cyberspace operations to public diplomacy, strategic communication, and economic policy initiatives. The nature of cyberspace operations makes it difficult to attribute actions back to the United States with certainty, unless we wish it to be known that the U.S. is conducting this activity. Finally, it provides an alternative array of responses that policy makers can use to offset growing Chinese power without immediate direct military confrontation.
Demographic, economic and social factors will combine to create a ceiling on Chinese power, ultimately causing it to enter a period of decline much sooner than it expects.[ii] These factors will stress the Communist Party’s ability to exclude economic, social and political participation of dissenters, and create further reliance by the Party on information control systems.
The Strategic Environment
The United States is a status quo power. It seeks to retain its position of dominance while realizing that relative to other powers, its position may rise or fall given the circumstances. It supports the post-World War II international order – a mix of international legal and liberal economic arrangements that promote free trade and the resolution of disputes through international organizations or diplomatic engagement when possible. The United States recognizes the growth of China, and that it will soon achieve “great power” status, if not already. It is most advantageous to the United States if the “rise” (or more correctly, return to great power status) of China occurs peacefully, and within the already established framework of international rules, norms, and standards.
There are two important considerations. First is the “singularity” of China with respect to its self-understanding and its role in the world. China views the last two centuries – a time when China was weak internally and under influence from foreign powers – as an aberration in the natural world order. Most Chinese consider their several thousand year history as the story of China occupying the center of the world with “a host of lesser states that imbibed Chinese culture and paid tribute to China’s greatness …” This is the natural order of things. In the West, it was common to refer to China as a “rising power,” but again, this misreads China’s history. China was almost always the dominant power in the Asia-Pacific, punctuated by short periods of turmoil. It just so happened that the birth and growth of the United States took place during one of those periods of Chinese weakness.[iii]
The strategic approach of China is markedly different, based on its concept of shi, or the “strategic configuration of power.” The Chinese “way of war” sees little difference in diplomacy, economics and trade, psychological warfare (or in today’s understanding, “information warfare”) and violent military confrontation. To paraphrase the well-known saying, the acme of strategy is to preserve and protect the vital interests of the state without having to resort to direct conflict while still achieving your strategic purpose. The goal is to build up such a dominant political and psychological position that the outcome becomes a foregone conclusion. This is in contrast to Western thought which emphasizes superior power at a decisive point.[iv]
To the American leadership, the “most dangerous” outcome of a competition with China would seem to be one that leads to war; hence the near-desperate desire to not undertake any action which might lead China down that path. Yet a better understanding of China suggests that it believes it can (and is) achieving its strategic purpose without having to resort to force. Its military buildup, use of economic trade agreements, diplomacy, and domestic social stability are creating the very political and psychological conditions where the use of force becomes unnecessary. China is quite content to remain in “Phase 0” with the United States, because it believes it is winning there. Thus, the question for America is not “How do we maintain the status quo in Phase 0?” but “How do we win in Phase 0?” The most dangerous course of action is not war with China, but losing to China without a shot being fired.
Figure 1. In 2015, China reorganized the PLA and created a new Cyber Warfare branch under its Strategic Support Force.
Current Offset Proposals
In response to the call for proposals, a number of initiatives and programs have been put forward by both the Department of Defense and leading national security think tanks. The underlying assumption of most of these proposals is that the United States has lost or is quickly losing its “first mover” advantage – such as that offered by the shift from unguided to guided munitions delivered from a position of stealth or sanctuary. In this regard, China represents a “pacing threat,” leading the way in developing its own guided weapons regime and the ability to deliver them asymmetrically against the United States.[v] In order to regain America’s military advantage, most recommendations follow along these lines:
Development and procurement of new platforms and technologies that leverage current perceived technological advantages over China in such areas as:
Unmanned autonomous systems;
Undersea warfare;
Extended-range and low-observable air operations;
Directed energy; and
Improved power systems and storage.
New approaches to forward basing, including hardening of infrastructure (both physical and communication networks), the use of denial and deception techniques and active defense;
Countering China’s threats to U.S. space-based surveillance and command and control systems;
Assisting allies and friends in the development of or exporting of new technologies that impose smaller-scale anti-access and area denial (A2/AD) costs on China; and
Reconstitute and reinvigorate Department of Defense “iterative, carefully adjudicated tabletop exercises and model-based campaign assessments.”[vi]
These approaches[vii] may have much to offer and are commendable, however they suffer from a glaring weakness: none target China’s center of gravity or critical vulnerabilities. They seek to leverage capabilities where the United States appears to enjoy an advantage, such as undersea warfare. For example, while it may be true that the People’s Liberation Army-Navy (PLAN) is not as proficient as the U.S. Navy (or some allies) in the undersea domain, it is also true that the Chinese regime is investing heavily to “close the gap” in these and other capabilities or is developing asymmetric alternatives. The United States will face a diminishing marginal utility as it attempts to maintain or widen the gap, especially in an era when China’s cyberspace-enabled information exploitation capabilities are extremely robust, and capable of transferring intellectual property back to China on a scale unimaginable in the Cold War.
More fundamentally, the offsets proposed are not guided by an overarching grand strategy that utilizes all elements of national power attacking key weaknesses and critical vulnerabilities in the Chinese regime, much in the same way that the Reagan Administration was able to do against the Soviets. Reagan’s policy and strategy represented a “sharp break from his predecessors,” eschewing containment in favor of attacking “the domestic sources of Soviet foreign behavior.”[viii] By recognizing the inherent weakness of the Soviet economic system, the new policy sought to leverage national military, political and economic tools to press the American advantage home, causing the Soviet system to collapse. This is not to suggest that the Chinese economic system suffers from the same malaise as their Soviet brethren did. Despite growing demographic, social and economic headwinds, it is unlikely that the United States can “bankrupt” the Chinese. However, China does have acute vulnerabilities – vulnerabilities which align with unique American advantages.
China’s Center of Gravity and Critical Vulnerabilities
None of the proposed previously mentioned offset lines of effort attempt to identify or target China’s COG. The center of gravity is defined by Milan Vego is “a source of massed strength – physical or moral – or a source of leverage whose serious degradation, dislocation, neutralization, or destruction would have the most decisive impact on the enemy’s or one’s own ability to accomplish a given political/military objective.”[ix] Joint military doctrine defines it as “The source of power that provides moral or physical strength, freedom of action, or will to act.”[x] The center of gravity concept is important to offset strategies because it enhances “the chance that one’s sources of power are used in the quickest and most effective way for accomplishing a given political/military objective.” It is the essence of “the proper application of the principles of objective, mass and economy of effort.”[xi]
Using an analytic construct designed by Vego, we note that any military situation encompasses a large number of both “physical and so-called abstract military and nonmilitary elements.” These are the “critical factors” that require attention and are deemed essential to the accomplishment of the objective, both of the adversary and ourselves. Not surprisingly, these factors encompass both critical strengths and critical weaknesses – both of which are essential. Critical vulnerabilities are “those elements of one’s military or nonmilitary sources of power open to enemy attack, control, leverage, or exploitation.” By attacking critical vulnerabilities, we ultimately attack the enemy center of gravity.[xii]The figure below shows notionally how China’s information control systems are a critical vulnerability (note that it is not all-encompassing).
Figure 2. Notional Center of Gravity Analysis[xiii].According to Vego, it is generally agreed that for most authoritarian/totalitarian regimes, the dictator, central governing party or leadership committee is the strategic center of gravity. In the case of China, the CCP is the sole governing political party. The top leadership of the CCP is the Politburo Standing Committee (or Central Standing Committee), currently made up of seven members and led by General Secretary Xi Jinping. A number of factors permit the continued rule of the CCP, including a massive domestic security apparatus and the world’s largest military, a growing standard of living and state control over media and information available to its people. In many ways, the Chinese leadership have already conducted their own vulnerability analysis and concluded that the free flow of information represents the biggest threat to their power – we can see this in both their words and deeds. China spends more on domestic security than on its own military. The last officially reported figures from the PRC in 2013 show the military budget was approximately 740.6 billion yuan ($119 billion) while domestic security received 769.1 billion yuan ($121 billion).[xiv] Beginning in 2014, the PRC stopped reporting on domestic security spending.[xv] In 2015, the PRC announced an 11 percent increase in “public security” spending to 154.2 billion yuan, or $24.6 billion. However, the total amount spent on domestic security remains unreported, and is certainly much higher, since regional and provincial figures are not provided. The reported military spending was 886.9 billion yuan, approximately $139 billion.[xvi] Fourteen separate state ministries are charged with domestic censorship responsibilities, everything from traditional press and broadcast media to text messages on cell phones.[xvii] A form of self-censorship has been institutionalized with Chinese internet companies being required to sign a “Public Pledge on Self-Regulation and Professional Ethics for China Internet Industry.”[xviii] In short, China has already shown what it fears most and where it is most vulnerable – it has performed its own “COG analysis” and has identified information control as a critical requirement to maintain CCP dominance.
Figure 3. In 2015, the U.S. and China met to discuss recent cyberspace issues.
A Cyberspace – IO Strategy
China’s regime identifies the free flow of information as an existential threat, and has erected a massive bureaucratic complex to censor and restrict free access to the nearly 618 million (and growing) Chinese internet uses (and 270 million social network users).[xix]However, the very nature of the Internet as a networked system makes censorship and restricted access difficult to maintain. As has been shown, China’s information control systems represent a critical vulnerability to their center of gravity. China’s network security is managed by a fragmented, disjointed system of “frequently overlapping and conflicting administrative bodies and managing organizations.”[xx]
China’s cyberspace operations and strategy are driven primarily by domestic concerns, with its central imperative being the preservation of Communist Party rule. Domestic security, economic growth and modernization, territorial integrity and the potential use of cyberspace for military operations define China’s understanding. Even its diplomatic and international policies are built around giving China maneuvering room to interpret international norms, rules and standards to serve domestic needs, principally through the primacy of state sovereignty. This creates a natural tension, as China must seek to balance economic growth and globalization with maintaining the Party’s firm grip on power. Not only is Internet usage controlled and censored, but it is also a tool for state propaganda.[xxi]
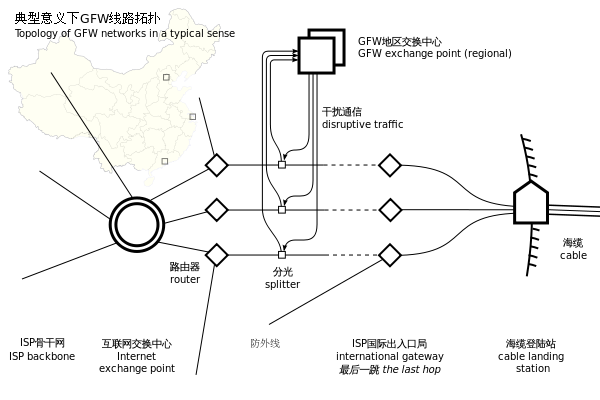
Chinese authorities use a number of techniques to control the flow of information. All internet traffic from the outside world must pass through one of three large computer centers in Beijing, Shanghai and Guangzhou – the so-called “Great Firewall of China.” Inbound traffic can be intercepted and compared to a regularly updated list of forbidden keywords and websites and the data blocked.[xxii] Common censorship tactics[xxiii] include:
Blocking access to specific Internet Protocol (IP) addresses;
Domain Name System (DNS) filtering and redirection, preventing the DNS from resolving or returning an incorrect IP address;
Uniform Resource Locator (URL) filtering, scanning the targeted website for keywords and blocking the site, regardless of the domain name;
Packet filtering, which terminates Transmission Control Protocol (TCP) transmission when a certain number of censored keywords are detected. This is especially useful against search engine requests.
“Man-in-the-Middle” attack, allowing a censor to monitor, alter or inject data into a communication channel;
TCP connection reset, disrupting the communication data link between two points;
Blocking of Virtual Private Network (VPN) connections; and
Network Enumeration, which initiates an unsolicited connection to computers (usually in the United States) for the purpose of blocking IP addresses. This is usually targeted against secure network systems or anonymity networks like “Tor.”
Figure 4. Simplified Chinese Firewall Topology[xxiv].China also heavily regulates and monitors Internet service providers, Internet cafes, and university bulletin board systems. It requires registration of websites and blogs, and has conducted a number of high profile arrests and crackdowns on both dissidents and Internet service providers. This “selective targeting” has created an “undercurrent of fear and promoted self-censorship.” The government employs thousands who monitor and censor Internet activity as well as promote CCP propaganda.[xxv]
China’s information control regime is vulnerable on a number of levels to a coordinated strategy that seeks to hold it at risk. From a technical standpoint, the distributed nature of the internet makes it inherently vulnerable, the “Great Firewall” notwithstanding. The techniques used to filter and block content have a number of workarounds available to the average person. For example, IP addresses that have been blocked may be accessed utilizing a proxy server – an intermediary server that allows the user to bypass computer filters. DNS filtering and redirection can be overcome by modifying the Host file or directly typing in the IP address (64.233.160.99) instead of the domain name (www.google.com). These are simple examples that a novice government censor can easily outwit, but the point remains.
China has long been rightfully accused of being a state-sponsor of cybercrime and theft of intellectual property. One negative consequence of this from China’s perspective is the high level of cybercrime within China “due in large part to rampant use and distribution of pirated technology” which creates vulnerabilities. It is estimated that 54.9 percent of computers in China are infected with viruses, and that 1,367 out of 2,714 government portals examined in 2013 “reported security loopholes.”[xxvi] China’s networks themselves, by virtue of their size and scope, represent a gaping vulnerability.
At the same time, China’s information control bureaucracy is especially unwieldy. This is an ideal target to exploit the seams and gaps both horizontally and vertically in their notoriously byzantine structure. The fourteen agencies that conduct internet monitoring and censorship operations must all compete for resources and the attention of policy makers, leading to organizational conflict and competition. Any strategy should exploit these fissures, complicating China’s ability to control information.
Part 2 will outline several lines of effort the U.S. might pursue to attack China’s critical vulnerabilities in its information control system. It will advance the notion that the full range of American power – overt, covert, diplomatic, economic, information and military – must be coordinated and managed at the national level to wage a successful information operations campaign. Based on America’s past success, the future may be brighter than it first appears. Read Part 2 here.
LT Robert “Jake” Bebber USN is a Cryptologic Warfare Officer assigned to United States Cyber Command. His previous assignments have included serving as an Information Operations officer in Afghanistan, Submarine Direct Support Officer and the Fleet Information Warfare Officer for the U.S. Seventh Fleet. He holds a Ph.D. in Public Policy from the University of Central Florida. His writing has appeared in Proceedings, Parameters, Orbis and elsewhere. He lives in Millersville, Maryland and is supported by his wife, Dana and their two sons, Vincent and Zachary. The views expressed here are his own and do not reflect those of the Department of Defense, Department of the Navy or U.S. Cyber Command. He welcomes your comments at jbebber@gmail.com.
[i] Charles Hagel. “The Defense Innovation Initiative .” Memorandum for Deputy Secretary of Defense. Washington, D.C.: Department of Defense, November 15, 2014.
[ii]Robert Bebber. “Countersurge: A Better Understanding of the Rise of China and the Goals of U.S. Policy in East Asia.” Orbis 59 no. 1 (2015): 49-61.
[iii] Kissinger, Henry. On China. (New York, NY: Penguin Books, 2012).
[v]Shawn W. Brimley. “The Third Offset Strategy: Security America’s Military-Technical Advantage.” Testimony Before the House Armed Services Committee Subcommittee on Seapower and Projection Forces. Washington, D.C., December 2, 2014.
[vi] David.Ochmanek. “The Role of Maritime and Air Power in the DoD’s Third Offset Strategy.” Testimoney Before the House Armed Services Committee Subcommittee on Seapower and Projection Forces. Washington, D.C., December 2, 2014.
[vii] This list is certainly not exhaustive. For a more thorough review of the ones mentioned, see:. Brimley, Shawn W. “The Third Offset Strategy: Security America’s Military-Technical Advantage.” Testimony Before the House Armed Services Committee Subcommittee on Seapower and Projection Forces. Washington, D.C., December 2, 2014. Martinage, Robert. “Statement Before the House Armed Services Subcommittee on Seapower and Projection Forces on the Role of Maritime and Air Power in DoD’s Third Offset Strategy.” Testimony Before the House Armed Services Committee Subcommittee on Seapower and Projection Forces. Washington, D.C., December 2, 2014. Ochmanek, David. “The Role of Maritime and Air Power in the DoD’s Third Offset Strategy.” Testimoney Before the House Armed Services Committee Subcommittee on Seapower and Projection Forces. Washington, D.C., December 2, 2014.
[viii] Thomas G. Mahnken.”The Reagan Administration’s Strategy Toward the Soviet Union.” In Successful Strategies: Triumphing in War and Peace from Antiquity to the Present, by Williamson Murray and Richard Hart Sinnreich. Cambridge: Cambridge University Press, 2014.
[ix]Milan N. Vego. Joint Operational Warfare – Theory and Practice. (Newport, RI: Government Printing Office, 2007) VII-13-29.
[x]Joint Chiefs of Staff. Joint Publication 5-0: Joint Operational Planning. (Washington, D.C.: Department of Defense, 2011).
[xi] Vego, Joint Operational Warfare – Theory and Practice, VII-15
[xiii]Joint Publication 5.0 defines Critical Capability as “A means that is considered a crucial enabler for a center of gravity to function as such and is essential to the accomplishment of the specified or assumed objective(s);” Critical Requirement as “An essential condition, resource, and means for a critical capability to be fully operational;” and Critical Vulnerability as “An aspect of a critical requirement which is deficient or vulnerable to direct or indirect attack that will create decisive or significant effects.”
[xx] Amy Chang. Warring State: China’s Cybersecurity Strategy. (Washginton, D.C.: Center for a New American Security, 2014) 12.
[xxi] Rebecca MacKinnon. “Flatter World and Thicker Walls? Blogs, Censorship and Civic Discourse in China.” Public Choice 134 (2008): 31-46.
[xxii] Michael Wines, Sharon LaFraniere, and Jonathan Ansfield. “China’s Censors Tackle and Trip Over the Internet.”
[xxiii] Jonathan Zittrain, and Benjamin Edelman. “Empirical Analysis of Internet Filtering in China.” Harvard Law School Berkman Center for Internet and Society. March 20, 2003, accessed December 23, 2014. http://cyber.law.harvard.edu/filtering/china/
[xxv] Thomas Lum, Patricia Moloney Figliona, and Matthew C. Weed. China, Internet Freedom, and U.S. Policy. Report for Congress, (Washington, D.C.: Congressional Research Service, 2013).









![Figure 2. Notional Center of Gravity Analysis[xiii].](https://cimsec.org/wp-content/uploads/2016/04/rsz_image_1.png)