By Colin Barnard
Though Alfred Thayer Mahan is famous for his advocacy of strong naval fleets to win decisive battles at sea, he saw the enduring purpose of navies as something much broader and not constrained to war: enabling and, if necessary, disrupting maritime trade. Even though Mahan could not have imagined autonomous weapons, the Houthis’ campaign against merchant shipping in the Red Sea would have been familiar to him. Whatever technology is used, however, maritime trade has been disrupted before; and, as before, the U.S. Navy and several of its allies are fighting to enable it, demonstrating the Navy’s enduring purpose for all to see. This analysis evaluates the naval response so far, from cooperating with merchant shipping, the cost effectiveness and vulnerabilities of using warships and missiles to counter drones, and the role of allies, to the potential implications for a future conflict with China and current efforts in defense innovation to prepare for it.
Cooperating with Merchant Shipping
Threats against merchant shipping are not new: pirates, German U-boats, and even other merchant ships have disrupted merchant shipping in the past. Navies, coast guards, and the international shipping community have long feared the potential for terrorists to exploit the vulnerability of merchant ships in one of the world’s many maritime chokepoints, of which the Bab-el-Mandeb Strait in the Red Sea is one of the most critical. A terrorist group backed by Iran, the Houthis have exploited the geography of the Red Sea to their advantage, targeting shipping to disrupt trade with disproportionate impact in order to effect political change–i.e., hindering Israel’s campaign against Hamas in Gaza. Protecting shipping from such terrorism is a job for naval forces, but they must cooperate with merchant shipping in doing so, as they have in the past.
Enter Naval Cooperation and Guidance for Shipping (NCAGS). An important NATO doctrine, NCAGS provides NATO navies with the tools to cooperate and guide merchant shipping during crisis and conflict. Its shortfalls arise because of the voluntary nature of this relationship. Though shipping can never be guaranteed full protection–especially without troops on the ground to mitigate land-based threats–navies must provide value to the shipping industry if it is to trust and rely on them for what protection they can provide. While the NCAGS doctrine has been practiced by NATO navies for decades, it does not seem to have worked as designed in the Red Sea. Early in the crisis, Reuters reported that shipping was “in the dark” on U.S. and allied naval efforts to counter Houthi attacks. The always candid John Konrad, founder and CEO of gCaptain, took to Twitter to highlight the perils of this apparent disconnect.
While communication between the NCAGS enterprise and shipping was likely better than publicly available information suggests, as Nathan Strang claimed, it would not be unreasonable to suggest the need for a closer relationship between the two. If they are not already, industry liaison officers could be used to better link the U.S. Navy and shipping, and foreign area officers could help allies get on the same page. Public affairs officers also have a role to play. If the NCAGS enterprise was doing its job per Strang, but efforts were difficult to surmise because of classification, carefully crafted news releases about these efforts could have helped put shipping at ease. Depending on NATO’s role in such a crisis, the NATO Shipping Center, NATO’s single point of contact for the international shipping community, would be the best link between the two. NATO has come to aid of merchant shipping before, even when the threat was outside its area of responsibility; and crises like this would help shore up its relationship with shipping in the event of crises or conflict closer to home.
Cost Effectiveness and Vulnerabilities: Destroyer vs. Drones
At the same time naval forces are demonstrating their enduring purpose in the Red Sea, outsiders are questioning the sustainability of manned, multi-billion warships facing off against much cheaper, unmanned drones. The missiles used to shoot down these drones cost upwards of $4 million, while the drones themselves cost only hundreds of thousands. But the issue of cost effectiveness in asymmetric warfare is not new. In the land campaigns of the Global War on Terror, for example, costly munitions were expended in the targeting of much less costly targets. That cost effectiveness is suddenly an issue for public discussion during a maritime campaign is yet another example of seablindness, but the concern is reasonable. Unmanned and easy to replicate, drones can be used to exhaust more expensive naval munitions before attacking warships directly without putting the drone operator at risk. The discussion of cost effectiveness has, therefore, extended to the vulnerability of warships.
This vulnerability was the subject of a recent article by Brandon Weichert, who bemoaned the Arleigh Burke-class guided missile destroyer as “a great navy warship past its prime.” Current and former naval officers were quick to criticize the article, which uses the 2000 attack on USS Cole as its prime example of such vulnerability but says nothing about weapon posture or layered defense (the Cole was moored in Yemen for refueling and unready when the attack occurred). While warship vulnerability against drones is concerning, all of history’s advances in weapon technology elicited similar concern. From the longbow and machine gun to the submarine and nuclear bomb, these advances created asymmetry even among peers, and only democratization of these technologies restored the balance. In the meantime, it should be obvious that the best course of action, as the United States (and now UK, too) is following, is to target bases and operators before drones become a threat–though it is doubtful that such strikes alone will be enough to make a difference.
While the Houthi’s use of autonomous systems is the latest example of their democratization, the Second Nagorno-Karabakh War was the first indication of such democratization on a mass scale, as well as the first instance of these systems being a decisive factor in war. Prior to the 2020 conflict, autonomous systems—drones—were the purview of major powers with the money to procure and employ them. In Nagorno-Karabakh, Azerbaijan employed them as a force of their own, devastating Armenian air defenses, tanks, artillery, and supply lines without putting traditional aircraft or their pilots in harm’s way. Similarly, in the Russo-Ukrainian war, Ukrainian forces have all but stopped the Russian Navy in the Black Sea, using drones to disrupt and in some cases destroy Russian warships. As John Antal warned in his detailed analysis of the Second Nagorno-Karabakh War, autonomous systems, now employed by state and non-state actors alike, are here to stay.
Absent Allies and Coalitions of the Willing
Due to the impact of Houthi attacks on world trade, the U.S. and several of its allies formed a coalition of the willing to respond to the crisis. Like the international response to piracy in the Horn of Africa, international naval cooperation has become a rule rather than an exception in the post-Cold War era. Globalization has necessitated this cooperation, increasing the impact of the threats to, and mitigations of maritime security relative to more traditional threats. But unlike the response to piracy, which saw NATO, the EU, and even China, India, and Russia deploy forces to protect maritime trade, NATO is notably absent from this crisis. The Israel-Hamas conflict has divided many allies on their response to the Houthi threat, even if all are affected by the disruption of merchant shipping in the Red Sea. NATO has the means to make a difference in this crisis, but politics as usual are in the way.
As of this writing, 14 states are supporting the U.S.-led Operation Prosperity Guardian. Of these 14, only eight are NATO members–the United States included. The EU’s Operation Aspides has even fewer supporters, though they include some of the NATO members absent from Prosperity Guardian. Of course, not all states supporting Prosperity Guardian are contributing warships; but the presence of staff officers, as Norway is contributing, will enhance cooperation. One of the merchant ships attacked early on in this crisis was Norwegian-flagged, incentivizing this contribution, but the general threat posed to freedom of navigation in the Red Sea should be incentive enough for all capable states to contribute. As should be obvious even to the seablind, the impact of supply chain disruption as seen during COVID, the grounding of the Ever Given, and, more recently, the destruction of the Francis Scott Key bridge, necessitates their contribution.
Whether or not it ultimately contributes to the crisis response, NATO must once again confront the challenge of deterring and defending against its perennial foe, Russia, while also contributing to maritime security. Worrisomely, NATO’s Allied Maritime Strategy is out-of-date. Its latest Strategic Concept, released in 2022, refocuses on Russia while maintaining NATO’s role as a maritime security actor; but it poorly articulates the maritime dimensions of NATO’s security environment. NATO is, first and foremost, a maritime alliance, and it needs a maritime strategy to guide its force structure and operational concepts. Such a strategy is more important considering the potential for a future conflict with China. If the U.S. Navy and potentially other NATO navies must surge to the Pacific, alliance buy-in will be needed to manage the varying threats to maritime security in and near NATO’s area of responsibility.
Implications for a Future Conflict with China
As the U.S. Navy and coalition members stand off against Houthi drones (and missiles) in the Red Sea, the implications for future conflict are worth examining. As in the Russo-Ukrainian War, drones have reduced asymmetry in this crisis; and they were decisive in the Second Nagorno-Karabakh War. Clearly, such technology must be at the forefront of the U.S. Navy’s planning for a future conflict with China, which has the industrial capacity to produce drones in far greater quantities than so far exhibited. Updates to strategy and the fleet design it informs need to be quick, as warships, submarines, aircraft, and their integration with this technology cannot happen overnight. The new U.S. Navy Chief of Naval Operations, Lisa Franchetti, called this state of affairs a “1930s moment.” In the 30s, the U.S. Navy was too small and insufficiently resourced for the coming Second World War, and the U.S. Navy is not much different today (shipbuilding delays being one of the most troubling examples).
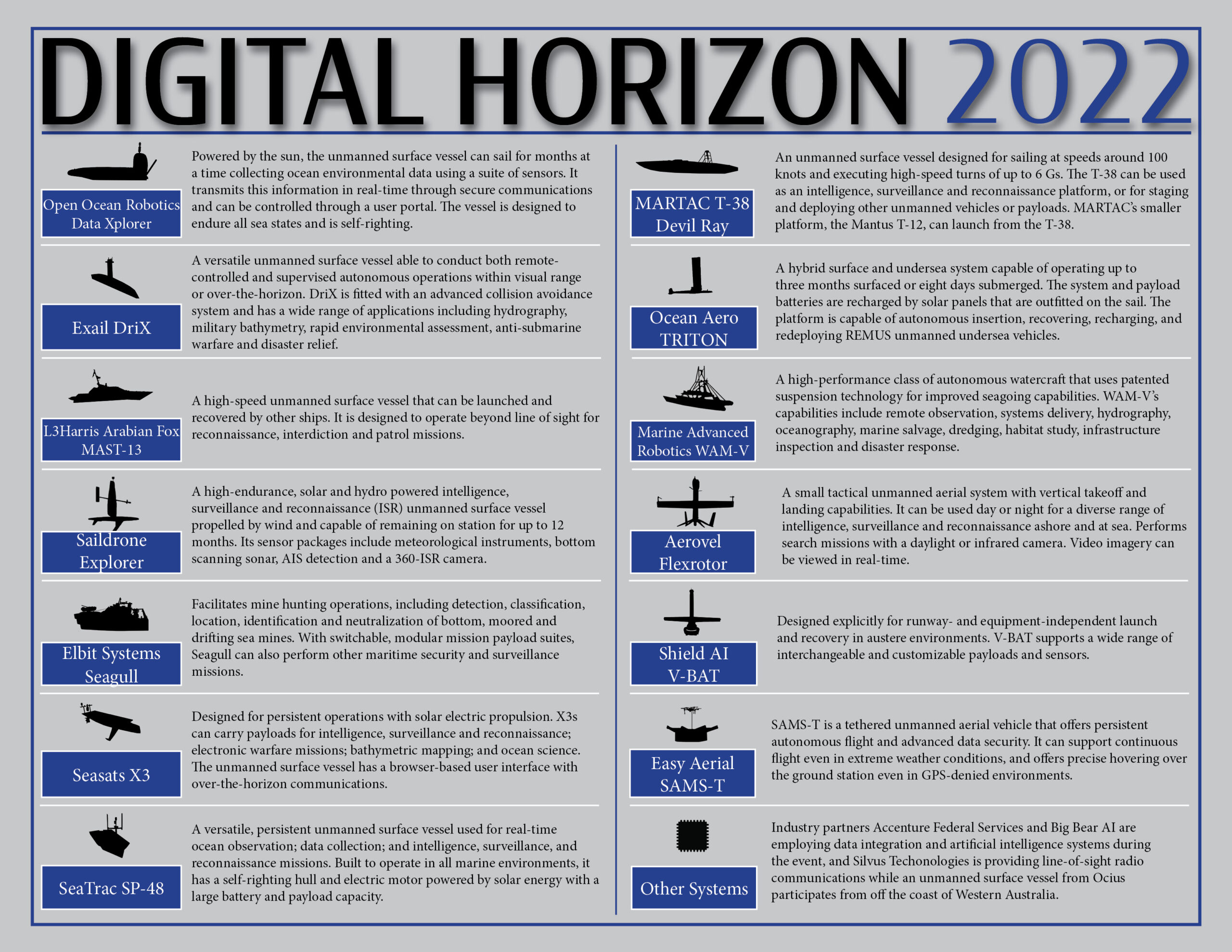
While the U.S. Navy’s strategy prior to the Second World War was centered on battleships, as Franchetti explained, it shifted from this platform-centric strategy to one integrating naval forces above and below the sea to defeat the Nazis and Imperial Japan. The next shift in strategy is clearly toward autonomy. The Navy is already making significant efforts to this end. The Replicator Initiative, focused on commercially sourcing and mass producing drones to take on China, is the overarching example of these efforts. The Navy’s unmanned Task Force 59 in the Middle East is the prime example of the Navy’s role at the pointy end of this strategy, developing and implementing its tactics. Likewise, other branches, especially the U.S. Marine Corps, are making efforts to better design themselves for next generation warfare. How exactly this next generation warfare will look is still unclear, but drones are likely to be used to counter drones. The era of drone-on-drone warfare is near.
One of the biggest lessons to be learned from the drone warfare experienced so far is offense-defense balance. Drones add to an already saturated battle space, increasing the burden on layered defenses. Leveraging emerging technology to improve offensive capabilities is critical, but defensive capabilities must be given corresponding weight. Importantly, however, neither offensive nor defensive capabilities need to be wholly reliant on emerging technology; “old ways” may prove to be more effective than imagined, as they were for Lieutenant General Van Riper in the infamous Millennium Challenge. The novel 2034, co-authored by retired Admiral James Stavridis and Elliot Ackerman, imagines how these old ways might make the difference in a conflict with China, should new technology be defeated. New technology might win some wars and mitigate certain crises; where it is not the deciding factor, however, old ways—or some combination of the old and new, as is currently on display in Ukraine—may be.
Conclusion
Navies are demonstrating their enduring purpose in the Red Sea Crisis, but their response has been far from perfect. The seemingly strained relationship between navies and merchant shipping evident early in the crisis is concerning, but establishing better relationships between the two using liaison officers and the NATO Shipping Center–if NATO involves itself—could help in the future. The cost-effectiveness and vulnerabilities of the naval response are also concerning, as is the absence of certain allies. Regardless, the drone technology at the center of this crisis is here to stay, and the implications for a future conflict are the most concerning of all. Defense innovation efforts are already underway to prepare for such a conflict, but over reliance on emerging technology to go on offense, without simultaneously preparing for defense, could be fatal. Going forward, navies are at the center of these challenges, especially war with China. Thankfully, the Red Sea Crisis could prove their perfect test.
Colin Barnard is a PhD candidate at King’s College London and foreign area officer in the U.S. Navy Reserve, currently assigned to a unit supporting U.S. Naval Forces Europe-Africa/U.S. Sixth Fleet in Naples, Italy. He was formerly on active duty for ten years, during which he supported U.S. and NATO operations across Europe, the Middle East, and North Africa. He has previously written for CIMSEC and the U.S. Naval Institute’s Proceedings. The views expressed in this publication are the author’s and do not imply endorsement by the U.S. Department of Defense or U.S. Navy.
Featured Image: The British-registered cargo ship Rubymar sinking, after it was targeted by Yemen’s Houthi forces in international waters in the Red Sea, on March 3, 2024, in the Red Sea. (Photo by Yemeni Al-Joumhouriah TV)