
As a closer to last week’s run of UUV articles – a publication review by Sally DeBoer, UUV week’s associate editor.
Discussion of how the world’s navies will incorporate unmanned underwater vehicles into their doctrine and infrastructure is very broad indeed. Will these technologies be complementary to existing architecture or stand-alone platforms? Will they operate autonomously (indeed, can we even achieve the degree of autonomy required?) or with a man-in-the-loop? Perhaps because the technology is so (relatively) new and (relatively) unestablished, with potential applications so vast, the conversation surrounding it blurs the line between what is and what if.

Thankfully, the meticulous staff at the RAND Corporation’s National Defense Research Institute, sponsored by the US Navy, produced a thorough and carefully researched study in 2009 outlining the most practical and cost-effective applications for underwater technologies. Using the US Navy’s publically-available 2004 UUV Master Plan (an updated version of this document was produced in 2011 but has not been released to the public) as a jumping off point, the authors of the study evaluated the missions advocated for UUVs in terms of military need, technical risks (as practicable), operational risks, cost, and possible alternatives. Analyzing an “unwieldy” set of 40 distinct missions spanning nine categories initially advocated in the 2004 version UUV Master Plan, the study delivers a more focused approach to how the US Navy might best and most effectively incorporate these unmanned systems. Though the UUV Master Plan document is, admittedly, quite out of date (the study itself now more than six years old), the findings therein are still highly relevant to the discussion surrounding the future of unmanned technologies beneath the waves.
Working with the very limited data available on UUVs, the authors of the study considered the technical issues inherent in developing and fielding unmanned underwater systems. Though the full complement of UUV hardware and software is considered in the study, for brevity’s sake this publication review will focus only on two technical factors: autonomy and communications. Intuitively, some missions (such as those of a clandestine or sensitive nature) demand more autonomy than others (like infrastructure monitoring or environmental surveillance). Pertaining to ISR missions, the study suggested that vehicle autonomy limitations would be a significant limiting factor. AUVs may not, for instance, be able to effectively determine what collected information is time-critical and what information is not. This potential weakness could be a tremendous risk; either the notional AUV would fail to transmit information in a timely manner or it would transmit non-useful information needlessly, risking detection and sacrificing stealth. Without significant development, therefore, lack of autonomy would present a technical challenge and, for some advocated missions, an operational risk. In the words of the authors “autonomy and bandwidth form a trade-space in which onboard autonomy is traded for reach-back capability and visa-versa.” The study also addressed perhaps the most frequently cited criticism of UUV technologies: communications and connectivity. Submerged UUVs, the study concludes, are limited in their ability to communicate by “the laws of physics,” while surfaced UUV’s ability to communicate are limited by technology (mast height, data output rates) and present yet another trade-off between stealth and connectivity. These communication systems are, in the words of the authors, considered mature, and are unlikely to be significantly improved by additional research and development.
It’s important to note (and probably obvious to readers) that development of technologies to address the challenges of autonomy and communication for UUV platforms are likely completely opaque to this author. The study’s findings, however, seem to match the challenges the US Navy is facing developing UUVs in the years after its publication. The Office of Naval Research’s Large Displacement Unmanned Underwater Vehicle (LDUUV) program awarded a $7.3 million contract to Metron Inc. to develop and field autonomy software, hardware, and sensors. The LDUUV, a pier-launched system, intended for endurance missions of more than seventy days, will need to effectively avoid interference, requiring a high degree of autonomy. A 2011 Office of Naval research brief envisioned that the LDUUV would “enable the realization of fully autonomous UUVs operating in complex near shore environments” concurrent with the development of “leap ahead” technologies in autonomy. In November of 2014, ONR unveiled a plan to develop an ASW mission package for the LDUUV, pursuing technology development in mission autonomy, situational awareness, and undersea sensors, with emphases on software-in-the-loop and hardware-in-the-loop simulations, and other ASW mission package components. Whether or not intensive R&D will produce the degree of “leap ahead” autonomy necessary for such operations remains to be seen. In the meantime, however, the RAND study’s recommended UUV missions are of particular interest and may dictate the application of funding in a time of scarcity. Put another way, the study’s conclusions provide a cogent and clear roadmap for what the US Navy can do with UUVs as they are and will reasonably become, not how it would like them or envision them to be.

So, then, there is the million (multi-billion?) dollar question: what missions are practically and cost-effectively best suited for UUVs, given these limitations, especially if a mismatch between desired technical functionality and funding and actual ability and allotments continues? The authors suggest (in concurrence with CIMSEC’s own Chris Rawley) that UUV technologies are first and foremost best suited for mine countermeasures, followed in priority by missions to deploy leave-behind sensors, near-land or harbor monitoring, oceanography, monitoring undersea infrastructure, ASW tracking, and inspection/identification in an ATFP or homeland defense capacity. These recommendations are based on already-proven UUV capabilities, cost-effectiveness, and demand. UUVs performing these missions, in particular MCM, have seen steady and
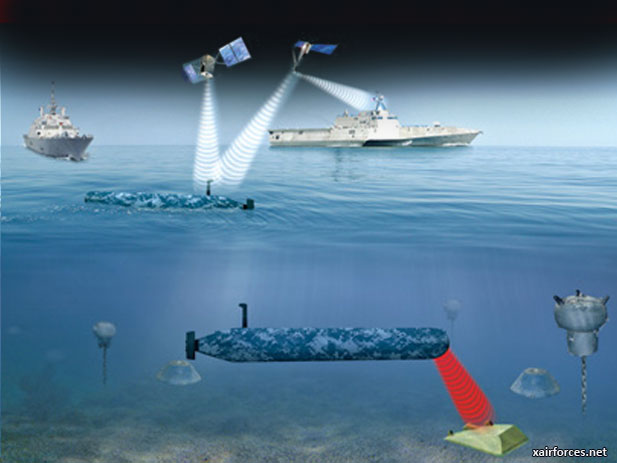
encouraging progress in the years since the study’s publication. NATO’s Center for Maritime Research and Exploration (CMRE) collected and analyzed data from four UUVs with high-resolution sonar deployed during Multinational Autonomy Experiment (MANEX) 2014. The Littoral Combat Ship’s (LCS) mine-hunting complement includes a pair of Surface Mine Countermeasures (SMCM) UUVs, dubbed Knifefish, that uses its low-frequency broadband synthetic aperture side-scanning sonar to look for floating, suspended, and buried mines and an onboard processor to identify mines from a database. The way ahead for longer-term missions demanding greater autonomy and reach-back over long distances is, for the time being, less clear.
This publication review is truly a very (very!) cursory glance at an incredibly detailed, highly technical study, and in no way does justice to the breadth and depth of the document. I encourage interested readers to download the original .pdf. However, the study’s contributions to an overall understanding of how and where UUVs can practically and cost-effectively support naval operations are significant, effectively reckoning the need to develop cutting-edge technologies with sometimes harsh but ever-present operational and financial realities. UUVs will undoubtedly have a significant role in the undersea battle-space in the years to come; RAND’s 2009 study provides keen insight into how that role may develop.
Sally DeBoer is an associate editor for CIMSEC. She is a graduate of the United States Naval Academy and a recent graduate of Norwich University’s Master of Arts in Diplomacy program. She can be reached at Sally.L.DeBoer(at)gmail(dot)com.