
By Terry Miller, Capt, USN Retired and John Rapp
A covert, in-mission, full kill chain, integrated, Mine Warfare Autonomous Underwater Vehicle (AUV) is described. It will significantly compress the kill chain beyond today’s overt detect to engage methods. It also eliminates or reduces costs associated with today’s multi-system approach. Over time, the MCM practice will inevitably evolve from overt to covert: this natural transition is discussed. The Navy asserts that time line improvements are urgently needed, but equally important is improved affordability. Cost savings for the integrated AUV are expected to be less than $5K per mine kill. The paper describes significant potential to reduce system costs using an integrated AUV solution instead of the multi-system approach of RMMV, AQS-20 and Archerfish. Such a AUV include the vehicle itself, with its associated power and propulsion and maneuvering systems, autonomous embedded intelligence, navigation system, sonar and other sensor systems, and weapon payload.
For the AUV’s primary sensor, Thales has developed the advanced SAMDIS (Synthetic Aperture sonar (SAS) Mine Detection Imaging System) which has onboard processing to autonomously detect, classify and localize stealthy mine targets with a high probability of detection and low probability of false alarm. SAMDIS processing also autonomously adapts behavior during the mission. SAS survey mode has 1.0 inch by 1.2 inch resolution out to 150 m range and multi-aspect classification mode 1.5 inch by 2 inch resolution out to 120 m range. SAMDIS’ autonomy enables a weapon payload to be added to the AUV for single sortie mine detection and neutralization. SAMDIS was fielded in FY 2014 on a 27 inch diameter TRL-9 AUV. It is an open architecture and modular system with future growth potential to incorporate new features via spiral development and it is currently in production.
A second essential technology is autonomous sonar and video perception processing. This technology has been developed both by Naval Special Warfare Center, Panama City Division (NSWC PCD) and by Thales to Technology Readiness Level (TRL) 6 and above. It is used on Autonomous Mine Disposal Vehicles (AMDV) such as Archerfish and K-Ster. This processing will be leveraged in the fire control module for a Hunter-Killer AUV to deliver a weapon or place an explosive charge.

A suitable weapon technology is a light-weight composite 30 mm launcher that would implant a round filled with either high explosives (HE) (for an explosive hard-kill) or reactive material (for a soft kill burn). Similar technology was developed by DTRA to counter roadside IEDs using .50 cal weapons. A 30 mm implant would be usefully larger and could integrate a 1316 compliant fusing device. Utilizing an EFI detonator enables digital fusing and affords either timed or controlled detonation, including detonation by an acoustically transmitted command. All these launch sensing, switch and fusing capabilities are currently “in-use” in penetrating darts that are already at TRL 6 and above. The launcher would weigh between 13 and 20 pounds. Its barrel could be constructed using a metal liner with composite over wrap to provide strength and rigidity while minimizing weight. To simplify the launcher and minimize weight a cartridge-less round using an electronic primer for its firing mechanism would be used. The launcher muzzle could be sealed with a frangible material that would allow it to operate at water depths exceeding 100m while allowing the projectile to be launched with minimal resistance. This launcher would be the only technology below TRL 6. However, three separate organizations 1) Naval Undersea Warfare Center (NUWC) Newport 20 mm water to water gun for torpedo defense, 2) DSG Technologies (www.dsgtec.com) and 3) AAC have matured in-water technology that operates stably using super-cavitation. A 30mm launcher provides sufficient terminal velocity to penetrate .5 inch cold rolled steel from a range of 30 feet. The key capability to penetrate and anchor a time delayed detonation device without setting off the target was demonstrated in 2014 by AAC and EMPI.
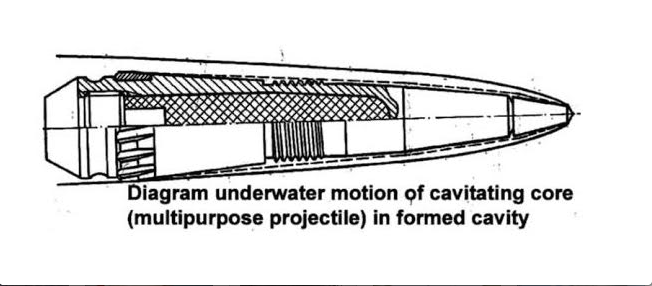
Water, due to its density, has a profound impact upon the terminal velocity of the implant at the target; a large change in terminal velocity only needs a slight change in range. The currently achieved standoff range of 30 feet is not sufficient to ensure safety of the AUV should the shot detonate the mine. Shooting from longer ranges requires significant basic research and development, both in material strengths and in achieving precise sonar fire-control accuracies before truly safe standoff ranges are achievable. Both DSG and AAC have repeating fire 30 mm launcher concepts with a multi-kill per sortie capability. The figure illustrates the DSG 30 mm projectile.
The AUV communicates with the surface ship through radio and acoustic links for low volume tactical data; the detailed high volume sonar and navigation data are recorded onboard and downloaded post mission.
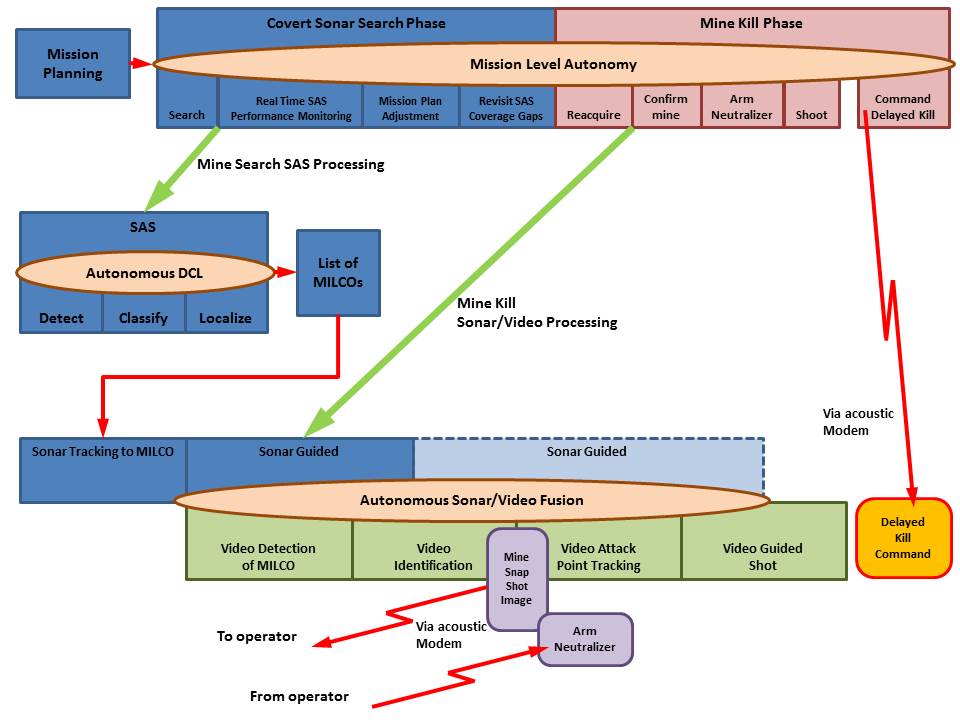
The concept of covertly mine clearing is to automatically reacquire the target, re-detect mine-like echoes in the area, and then approach using the best echoes. At a short range, the object is identified autonomously by the sonar and video perception processing; then if it is a mine, the AUV works through the risks and best approaches so as not to jeopardize the mission with any single mine kill , and would only then arm a weapon, place a charge, or fire a neutralization device. The neutralization device could provide delayed detonation if needed. The autonomy is most effective when the AUV engages multiple targets in a mission. This type of autonomy is achievable today.
An intermediate concept of operation would transition today’s overt practices into the covertly operating concept just described. In the near-term, the autonomous fire-control will send one compressed image wirelessly; that is used by an operator to assess and then commit to the target; then the operator would issue the wireless command to gate open the final arming stages that progress all the autonomous fires upon the target. The image payload is constrained by the limited bandwidth of such a wireless link. That means the autonomy must maneuver to make the best identifying image to compress and send. Methods for transmitting a still snapshot picture via an acoustic modem are already being practiced. For example, Thales has demonstrated this capability for the VAMA program in Europe.
An in-mission full kill chain integrated AUV would dramatically compress the kill chain from traditional Navy detect to engage approaches. It will also eliminate and reduce costs compared to their multi-system approach. Over time, the MCM practice will transition from overt to covert. The time line savings still need to be modeled and validated, but early estimates calculate 3000% improvement, or several orders of magnitude savings in operational time lines. Cost savings are similar because the mine kill per engagement with a 30 mm device are estimated to be less than $5K per mine kill. The reduction in system cost is potentially huge by scaling to one system that replaces the multi-system of RMMV, AQS-20 and MH-60S Archerfish neutralization placement.
About the Authors
Terry Miller, Capt, USN Retired – Career Special Operations Diver with over 24 years in Mine Warfare, working for Advanced Acoustic Concepts (AAC) a joint venture company owned by DRS Technologies and Thales. He is a veteran of Desert Storm, USS Tripoli and USS Princeton mine strikes and conducted the first influence sweep in combat since the Korean War onboard USS Leader MSO 490. Terry has over 4000 hours of sonar contact time and ROV operations in combat, in training, and in simulated training against various mine shapes. He served on the Avenger MCM class as Division Officer, Executive Officer and Commanding Officer. He was the OPNAV Branch Head for Mine Warfare and ASN/RDA Acquisition Coordinator to JIDDO for Counter IED.
John Rapp – Systems engineer with 35 years experience in the defense industry, working for AAC as Director of Advanced Systems. He is a multi-disciplined inventor with 36 US patents awarded; one-third regard underwater weapons.
Discover more from Center for International Maritime Security
Subscribe to get the latest posts sent to your email.