Last week CIMSEC featured articles submitted in response to our Call for Articles issued in partnership with the U.S. Navy’s Program Executive Office for Unmanned and Small Combatants. From unmanned minehunting systems to swarming warfighting concepts, authors offered a glimpse into the future of how mine warfare could evolve.
Below are the articles that featured during the topic week. We thank the authors for their excellent contributions.
“By harnessing unmanned systems and machine learning, the U.S. Navy can bridge the gap between its own mine countermeasures capability and the growing mine warfare threat.”
“One such doctrine is the Allied Worldwide Navigational Information System, or AWNIS, which is crucial for conducting military operations at sea, especially mine warfare, while minimizing disruption to merchant shipping. This crucial doctrine can help modify and reroute sea lines of communications as they become threatened and endure combat operations. But unfortunately, the U.S. Navy knows very little about this system, its processes, or its merits.”
“In our collective Navy experience—spanning half a century—this is not a new issue for the U.S. Navy, but one it has struggled with for decades. We contend it is not for lack of want, or even a lack of funding (although MCM resourcing has lagged other procurement priorities), but rather, not having adequately mature technology to address the challenge.”
“In nature, everywhere we look, we see large groups of creatures that cooperate with each other to complete sophisticated tasks. For some problems, such as search and detection, their methods are far superior to our own. We suggest mimicking nature to develop a swarm-based approach with the ultimate goal being the development of advanced MCM capabilities.”
“The U.S. Navy has developed a vast array of novel technologies to counter the ever evolving mine threat and has made great advancements in its MCM capabilities. We contend, however, that in order to make revolutionary advancements in our ability to counter mines, a shift from direct, operational/tactical-level thinking to indirect, strategic-level thinking needs to occur.”
Dmitry Filipoff is CIMSEC’s Director of Online Content. Contact him at Content@cimsec.org.
Featured Image: Featured Image: SOUTH CHINA SEA (July 3, 2019) Mineman 2nd Class Collin Harvey uses vehicle handling system (VHS) to recover a mine neutralization vehicle (MNV) aboard the Avenger-class mine countermeasure ship USS Pioneer (MCM 9). (U.S. Navy photo by Mass Communications Specialist 2nd Class Corbin Shea)
By Dr. Keith Aliberti and Mike Kobold, Naval Surface Warfare Center, Panama City Division
Sea mines have long been used as an effective form of asymmetric warfare as they are “easy to lay and difficult to sweep; their concealment potential is strong; their destructive power is high; and the threat value is long-lasting.”1 Key objectives of utilizing sea mines for “blockading enemy bases, harbors, and sea lanes; destroying enemy sea transport capabilities; attacking or restricting warship mobility; and crippling and exhausting enemy combat strength”2 clearly demonstrate that sea mines pose a significant threat to the U.S. Navy and its allied navies. The U.S. Navy has developed a vast array of novel technologies to counter the ever evolving mine threat and has made great advancements in its MCM capabilities. We contend, however, that in order to make revolutionary advancements in our ability to counter mines, a shift from direct, operational/tactical-level thinking to indirect, strategic-level thinking needs to occur.
Borrowing from great advancements that the U.S. has made in its ability to counter improvised explosive devices (C-IED) over the past 17 years of war, we contend that an overarching strategic approach is necessary – a pervasive, persistent intelligence, surveillance, reconnaissance (ISR) approach to MCM that requires a paradigm shift in how we approach the problem. Over the course of the wars in Afghanistan and Iraq, the U.S. military shifted from the operational/tactical strategy of “finding, fixing, and finishing IEDs” to a strategic approach of pervasively and persistently surveiling vast spaces to “know” where IEDs are. This approach required a paradigm shift in how to counter IEDs that was met with great success. We argue that MCM requires a shift in mindset from looking at MCM as an operational/tactical problem of “finding mines” to a strategic problem of “knowing where a mine is, a priori.”
It is no small feat to monitor a region, day and night, 24/7, to provide overarching ISR that can be utilized to say, with utmost confidence, that there is something of interest at a particular location. For land-based ISR, the U.S. military has at its disposal significant overhead imaging capabilities (whether from blimps, manned/unmanned aircraft, and/or satellites) to enable the realization of this approach. The challenges we face in countering mines, however, are compounded by, what these authors refer to as, the 3 by 3 problem: Mines are typically deployed via air, surface, and undersea platforms; are often found on the seafloor (proud or buried), moored, or drifting; and are typically of the contact, influence, or remotely detonated type. In essence, we have to deal with myriad mine threat types and operational environments.
Strategically, operationally, and tactically, our ability to yield an overarchingly pervasive and persistent MCM ISR capability cannot be achieved without significant advancements in our technical capabilities. Rapid establishment of long sea lines of communication, offshore operating areas, amphibious operating areas, and littoral penetration areas are required to establish large, safe operating areas and transit routes – and all of these drive MCM mission requirements. Time is paramount for MCM operations and while our desire for an “all-knowing” capability is not yet within reach, intersection of the core ISR components of multimodal and multidimensional continuous collection across the littoral battlespace (sensing), near-real-time and knowledge distribution (delivery), and horizontal integration of data coupled with advanced, distributed analytics (sensemaking and understanding), will enable “perfect knowledge.”3
One example of a niche capability developed over the past few years that will contribute to pervasive, persistent ISR is the U.S. Navy’s commitment to address near real-time knowledge distribution. Critical to our ability to sense and deliver within MCM operations and to “know” where mines are, will be large, distributed underwater wireless sensor networks (DUWSNs) that utilize novel acoustic underwater communication protocols. DUWSNs, as envisioned, are self-organizing networks of mobile sensors that enhance sensing, monitoring, and surveillance capabilities. They form a mobile, dynamic observation system to enhance the ability to detect, classify, localize, and track events of interest to provide underwater sensing and surveillance capabilities that will lead to more precise knowledge about surface, subsurface, and underwater activities, particularly for the detection, classification, and location of mines and minefields. DUWSNs are both mobile and dynamic (can adapt to changing conditions) in nature. In addition, they can monitor and detect time-varying events occurring within both their local and extended underwater environments. DUWSNs, when fully realized, will provide “perfect knowledge” about surface and subsurface activities and, hence, to the “all-knowing” capability that is necessary to provide revolutionary capabilities for MCM.
Inherent to the success of DUWSNs is effective communication, using acoustics, amongst all of the dynamic nodes of the network. Underwater acoustic channels, however, feature large-latency and low-bandwidth. In addition, the sensor nodes of a DUWSN are mobile and will shift position relative to one another due to dispersion and shear thereby resulting in coordinated networking amongst large numbers (potentially hundreds to thousands) of densely-deployed sensors a challenge. The “rules” by which the sensor nodes communicate, otherwise known as communication protocols, are key to advancing near-real-time delivery of information. The U.S. Navy has conducted research and development on novel network architectures to meet the needs of short-term, time-critical and long-term, non-time-critical MCM operational requirements. Using a systems engineering approach to acoustic communications, we have developed statistical models of undersea acoustic transmissions that allow a priori decisions on what communication protocols are to be used to communicate effectively and efficiently based on the location of the DUWSNs. Specifically, there are anisotropies and inhomogeneities in the water column that cause deviations in acoustic direct-path trajectories. We have used sound speed profiles (SSPs) that simulate tidal and storm variations (deterministic) and various random SSPs, both based on measurements, and this has led to our ability to develop specific, effective, and efficient communication protocols. We have developed Acoustic Modem Protocol Statistics (AMPS) that enable the calculation of throughput in terms of the percent of communication packets properly received using modem specifications. This research greatly enhances our ability to develop the right acoustic communication protocols to meet the demands of advanced underwater networks.
We want to stress that acoustic communication protocols and advances in DUWSNs are one component of the aforementioned overarching strategic shift in our thinking of how to address the challenges posed by sea mines. What DUWSNs provide is not so much in their technical capability, but a shift in how to apply new, innovative technologies to look at the MCM problem. In essence, the intent is for DUWSNs to be part of a much larger system-of-systems that includes unmanned underwater vehicles, components of subsea and undersea warfare, and littoral operations to enable pervasive and persistent ISR capabilities that will provide a major strategic, operational, and tactical advantage for MCM operations.
Dr. Keith Aliberti received his doctorate and master’s degrees in Physics from the University Center at Albany, State University of New York, in 1998 and his bachelor’s degree in Physics from Rensselaer Polytechnic Institute in 1992. He is the head of the Science and Technology Department at the Naval Surface Warfare Center, Panama City Division, where he oversees research and development of mine countermeasures technologies, advanced mining, unmanned system technologies, and maritime special programs.
Mr. Michael Kobold received his master’s degree in Physics from the University of Michigan and his master’s degree in Electrical Engineering from the Air Force Institute of Technology. He is an optics, seismic, acoustic, and image processing scientist in the Intelligent Sensing and Irregular Warfare Branch of the Naval Surface Warfare Center, Panama City Division, and holds a Professional Engineering License in Mechanical Engineering. He has extensive experience in nonlinear structural engineering, remote sensing, infrasound-related security and stability operations surveillance techniques, and electro-optics. Recently, his efforts have been focused on acoustical communications in underwater networks.
References
[1] Erickson, Andrew S., Goldstein, Lyle J., and Murray, William S. “Chinese Mine Warfare: A PLA Navy ‘Assassin’s Mace’ Capability”, Naval War College China Maritime Studies #3, June 2009.
[2] Ibid.
[3] Stojanovic, Milica and Beaujean, Pierre-Philippe J. “Acoustic Communication.” In Springer Handbook of Ocean Engineering, pp. 359-386. Springer, Cham, 2016.
[4] Hogan, Todd C., “The Persistent Intelligence, Surveillance, and Reconnaissance Dilemma: Can the Department of Defense Achieve Information Superiority?”, Thesis presented to the Faculty of the U.S. Army Command and General Staff College, Fort Leavenworth, Kansas, 2007.
Featured Image: Lt. Andrew Kuo, from Durham, North Carolina, assigned to Explosive Ordnance Disposal Mobile Unit (EODMU) 5 Platoon 501, attaches a dummy explosive charge to floating mine during Mine Warfare Exercise (MIWEX) 2JA. MIWEX 2JA is part of an annual series of bilateral exercises held between the U.S. and Japan to increase proficiency in mine countermeasure operations. (U.S. Navy photo by Mass Communication Specialist 2nd Class Mario Coto)
By Dr. Joseph Walsh III, Naval Surface Warfare Center, Panama City Division
The Navy is in a position to create a concrete definition of what swarms of unmanned vehicles (UxVs) can do for the future of mine countermeasures (MCM). Some advantages are ready to be applied while others are still on the horizon. The Naval Surface Warfare Center, Panama City Division has invested in the development of swarming-based technologies for MCM. Swarms require specific ‘swarm algorithms’ that will allow otherwise standalone systems to collaborate by dividing up tasks, such as surveying potential minefields, and these algorithms will need to be specifically designed to optimize division of labor. Those optimizations are only the tip of the iceberg for what can be done to improve future naval MCM capabilities. The Navy of the future might have:
Swarms that neutralize mines, rather than attempt to detect them
Swarms that could lead a ship safely through a minefield in a fraction of the time it would take to clear the area
Swarms that spread out over a minefield, “sniffing” for specific sonar or chemical signatures in the water, in the same way that animals or insects cooperatively search for prey
Swarms made up of existing MCM systems, using minimal resources to neutralize a minefield with a “divide and conquer” approach
Swarms that identify and defeat swarm-based mines
By exploiting swarm-based technologies, there is potential for the Navy to shape MCM for a generation. However, in order to take full advantage of swarming capabilities, three significant shifts in how we think about MCM are required.
Economy of Scale: More Units for Less Money
Economy of scale is perhaps the most immediate opportunity for naval MCM development. Existing MCM systems are typically single, large systems that tend to be costly to develop and deploy. Moving to swarming-based technologies may allow a shift from single, large MCM systems to multiple, lower cost, swarming-based, modular systems. Current naval MCM systems yield significant capabilities and are superior not only in their design, but in their ability to detect mines. A single MCM system, however, is often limited to be in one place at one time. Furthermore, limited resources reduce the overall availability of MCM systems thereby limiting our ability to conduct missions.
Developing large numbers of inexpensive MCM units, designed to work collaboratively in swarms, is one way to advance MCM capabilities. Simply by virtue of their numbers, swarming units provide increased flexibility when dealing with logistical and operational challenges. Swarms can be combined, or subdivided, depending on the strength required. When deciding how much MCM capability to assign to a region, commanders would be able to choose from multiple options. Cost reduction may open up new strategic options. Inexpensive swarm units are expendable and this allows the Navy to build swarming MCM systems designed not to only detect mines but to also trigger them in efforts to speed the process of mine clearance while being able to accept more risk. With a swarm specifically designed to detect and trigger mines, some of the existing problems we face in mine detection become irrelevant. Certainly, some members of the swarm might be lost to an explosion, but fewer than one might think. Most of the individual swarming units would be scattered but intact, so the remaining swarm agents could simply regroup and continue their work.
Once we consider the paradigm shift of more units for less money, we need to consider how that shift will affect our design of future MCM capabilities.
Modularity: Design Teams Not Systems
Swarm-based MCM designs need to focus on modularity: separating the work into individual components, according to their design and how they will be used. Modular systems are easy to test and upgrade, and when they do break, they are much easier to diagnose and repair. In a modular swarm, individual UxVs are specialized. They perform the fewest tasks necessary, because they can count on their nearby teammates to complete the mission.
A modular approach allows for the creation of highly specialized MCM units. For example, consider the problem of detection. Different types of mines require different, specialized detection approaches, so if commanders know what type of mines might be present, they can deploy swarming sensing units optimized for those detections. If the mines are buried, even more specialized approaches are typically required. Similar trees of specialization and sub-specialization can be constructed for problems of identification and neutralization.
With a single system, all of the parts are designed to work together. Components are judged and chosen based on how they impact the system as a whole. To be effective, swarms need similar consideration. This brings us to the next point.
Compatibility: Metrics to Encourage Collaborative UxVs
Acquisitions that take a single-system approach have a tendency to stovepipe development and while this has been successful, we are suggesting a different approach. Current systems are often tested and evaluated in isolation, without consideration for how the might interact with other systems. A swarm is, by definition, a large group collaborating toward some goal. A swarm-based approach to acquisition will measure the success of a program by its effectiveness in groups, particularly groups composed of a variety of different UxVs.
Specifically, the Navy could test and evaluate how a new product works when applied to swarm-based scenarios. It should offer incentives for the use of multiple kinds of agents, particularly those designed by outside groups. (Increased collaboration between diverse research teams is one side-effect of this approach.) The Navy might also consider developing standard scenarios for swarm-based MCM, both to direct innovation and to offer a concrete basis for measuring success.
Above and beyond standardizing scenarios, the Navy is poised to take the lead in defining what swarm-based MCM means. This would require investments in several important swarm-enabling technologies, such as:
Improved communications. In contested environments and underwater, messaging is slow and bandwidth is at a premium. Anything that improves these conditions makes swarm-based MCM easier and more effective.
More robust communication systems.
A rapid-development approach to swarm member creation. Specifically, this does not mean developing a “minimal cost viable prototype,” but establishing a process whereby finished products can quickly transition from laboratory to factory, and once there, can be produced inexpensively in large quantities. The focus here should be on single-function swarm members that add specific desirable capabilities, even if that makes them dependent on the results of other projects.
Improved swarm logistics. If development is not done carefully, rapid deployment of swarms could become an insurmountable obstacle. Ideally, swarm deployment could be as simple as emptying a box of them over the side of a ship, and retrieval as easy as scooping them up in a large net. With a proper recharging station, readying the swarm could be practically painless.
To achieve successful swarm-based MCM, the Navy will need to develop a mindset around large groups of swarming technologies that are low cost and, perhaps, expendable. The human mind is hard-wired to think in terms of action by individuals, or possibly small groups. Yet this is not the only option. In nature, everywhere we look, we see large groups of creatures that cooperate with each other to complete sophisticated tasks. For some problems, such as search and detection, their methods are far superior to our own. We are suggesting to mimick nature to develop a swarm-based approach with the ultimate goal being the development of advanced MCM capabilities.
Dr. Joseph Walsh received his doctorate degree in Mathematics from the Georgia Institute of Technology in 2017. His dissertation is in the area of optimal control and his research has been applied to heterogeneous teams of vehicles. He has published numerous papers in multi-agent coordination. He is currently the head of the Applied Sensing and Processing Branch at the Naval Surface Warfare Center, Panama City Division.
Featured Image: Naval Oceanographic Office personnel prepare to launch 10 littoral battlespace sensing gliders from USNS Maury in the Eastern Atlantic Ocean in support of NAVOCEANO’s goal to deploy more than 50 gliders globally. (U.S. Navy photo)
For those with stewardship of the U.S. Navy’s mine warfare capabilities, the old saying about meteorological phenomena rings true: “Everyone talks about the weather, but no one does anything about it.” Over the past several decades, the U.S. Navy has articulated a commitment to delivering robust mine countermeasures assets to the Fleet. This “aspirational” vision has yet to be realized. That might have been enough when the United States was the sole superpower with unfettered access to the world’s oceans and the littorals, but today the Navy must accelerate its efforts to field effective mine countermeasures in an era of renewed great power competition.
As Dr. Sam Taylor, Senior Leader, Mine Warfare Program Executive Office, Unmanned and Small Combatants (PEO USC), articulated in his CIMSEC call for articles, Mine Countermeasures (MCM) is one of the most difficult and time-consuming missions for navies to successfully execute. And while the U.S. Navy has made some important strides, such as the MCM package aboard the Littoral Combat Ship (LCS), the significance of the MCM mission provides both the impetus and opportunity to do much more.
In our collective Navy experience—spanning half a century—this is not a new issue for the U.S. Navy, but one it has struggled with for decades. We contend it is not for lack of want, or even a lack of funding (although MCM resourcing has lagged other procurement priorities), but rather, not having adequately mature technology to address the challenge.
As Dr. Taylor suggests, emerging technologies may offer the Navy the ability to bridge this gap and usher in a true “21st Century renaissance in MCM.” We have first-person experience with technologies that can be readily harnessed and can help the Navy up its MCM game today. We emphasize the near-term because the solution we suggest employs proven commercial-off-the-shelf (COTS) hardware and software that we believe can supply a robust MCM capability to the Navy without waiting for the lengthy planning, programming, budgeting, and execution process to deliver these assets years in the future.
Mine Countermeasures: Not a New Challenge
In terms of availability, variety, cost-effectiveness, ease of deployment and potential impact on naval expeditionary operations, mines are some of the most attractive weapons available to any adversary determined to prevent Joint or coalition forces from achieving access to sea lines of communications or the littorals.
In the past several decades, rogue states have indiscriminately employed sea mines. Libya used mines to disrupt commerce in the Gulf of Suez and the Strait of Bab el Mandeb. Iran laid mines to hazard military and commercial traffic in the Arabian Gulf and Gulf of Oman. During the Gulf War in 1990-1991, the threat of mines precluded the effective use of the Navy and Marine Corps expeditionary task force off the shores of Kuwait and hazarded all U.S. and coalition forces operating in the Arabian Gulf. The threat posed by mines was so extensive that clearance operations in this confined body of water were not completed until 1997.
Today, the threat posed by potential adversary mining capabilities is even greater. The number of countries with mines, mining assets, mine manufacturing capabilities, and the intention to export mines has grown dramatically over the past several decades. As of this writing, more than 50 countries possess mines and mining capability. Of these, 30 countries have demonstrated a mine production capability and 20 have attempted to export these weapons. In addition, the types, sophistication, and lethality of the mines available on the world market are rapidly increasing.
There is little doubt that adversary sea mines pose one of the most compelling challenges faced by the United States. It falls squarely on the U.S. Navy to provide the MCM capability to enable the Joint Force to operate forward in support of United States’ interests, as well as those of our allies and friends. Indeed, the U.S. Navy’s strategic document A Design for Maintaining Maritime Superiority 2.0 (Design 2.0) articulates the profoundly challenging strategic environment where peer competitors such as China and Russia and lesser (but more unstable) powers such as North Korea and Iran, have impressive naval mine inventories. Design 2.0 notes that, “It has been decades since we last competed for sea control, sea lines of communication and access to world markets.”1 One doesn’t have to be a Sun Tzu or Clausewitz to understand that the threat of naval mines is one of the key challenges that drives our emerging need to once again compete for freedom of movement on the world’s oceans, as well as in the littorals.
Design 2.0 also notes that the U.S. Navy will harness the increasing rate of technological creation and adoption to help shape the modern security environment to ensure that the United States prevails in any future conflict. Mine warfare is one of those key areas, and one that lends itself to harnessing emerging technologies. Sadly, other than the LCS MCM Mission Package, there has been little innovative technology adoption in this area. Dr. Taylor suggests that the Navy needs to harness emerging technologies that go well beyond the added capability coming to the Fleet through the modular LCS MCM Mission Package.
This call for action is not new. For example, in May 1998 the U.S. Navy and Marine Corps issued a document entitled, A21st Century Warfighting Concept: Concept for Future Naval Mine Countermeasures in Littoral Power Projection.2 The publication laid out the magnitude of the worldwide mine threat and proposed solutions. But today, the threat is more compelling, simply because our adversaries now have mines which can deny us access and severely limit our ability to operate forward as a Navy and Marine Corps team.
Through the entirety of our mutual U.S. Navy experience (which began in 1969 and 1988, respectively) we have witnessed the Navy “admire the problem” of MCM. For example, in the late 1990s, Chief of Naval Operations, Admiral Jay Johnson, and Commandant of the Marine Corps, General James Jones, signed out the fourth edition of the unclassified and widely distributed Naval Mine Warfare Plan.3 Shortly thereafter came the aforementioned 21st Century Warfighting Concept: Concept for Future Naval Mine Countermeasures in Littoral Power Projection. Several years later, the Commander in Chief of the U.S. Atlantic Fleet, Admiral Robert Natter, and Commander in Chief of the U.S. Pacific Fleet, Admiral Thomas Fargo, jointly published an unclassified Carrier Battle Group/Amphibious Ready Group Mine Warfare Concept of Operations (CVBG/ARG MIW CONOPS).4
Other studies and analyses followed—both within the Navy and Marine Corps—as well as in Congressional Research Service studies, Government Accountability Office reports, think tank reports and in open defense-related media. But the recommended development persistently fell below the funding line, leaving the Navy using and modestly upgrading legacy MCM systems. An article in National Defense Magazine over a decade ago, “Navy Rethinking Mine Warfare,” heralded a new era in the way the Navy addresses the MCM challenge.5 Sadly, not much has happened since then, but it can now, by harnessing emerging technologies.
Leveraging Emerging Unmanned Vehicle Technologies
Due to the extreme challenge of putting manned naval vessels in sea areas where mines are present—witness the severe damage done to USS Samuel B. Roberts, USS Tripoli and USS Princeton—we agree with the Navy’s pivot to unmanned vehicles as a primary solution to the Navy’s MCM solution set and to “Take the Sailor out of the minefield.”6 Today, it appears the U.S. Navy does have the desire to accelerate the testing and fielding of unmanned systems.
Some years ago, Captain Jon Rucker, as Program Manager of the Navy program office (PMS-406) with stewardship over unmanned maritime systems (unmanned surface vehicles and unmanned underwater vehicles), discussed his programs with USNI News. The title of the article, “Navy Racing to Test, Field, Unmanned Maritime Vehicles for Future Ships,” captured the essence of where unmanned maritime systems will fit in tomorrow’s Navy, as well as the Navy-After-Next. Captain Rucker shared:
“In addition to these programs of record, the Navy and Marine Corps have been testing as many unmanned vehicle prototypes as they can, hoping to see the art of the possible for unmanned systems taking on new mission sets. Many of these systems being tested are small surface and underwater vehicles that can be tested by the dozens at tech demonstrations or by operating units.”7
Speaking at the January 2018 Surface Navy Association Symposium, Captain Rucker continued the drumbeat of the bright future for unmanned maritime systems, noting, “We have been given special authorities to do accelerated acquisitions,” and referenced several USV and UUV programs. He noted that the Chief of Naval Operations, Admiral John Richardson, as well as the Assistant Secretary of the Navy for Research, Development and Acquisition, Mr. James Geurts, have been proactive in advocating the accelerated development of unmanned maritime systems. Captain Rucker concluded his remarks by explaining how the Navy will insert unmanned maritime systems into the Fleet:
“As the technology is ready we will insert it into the systems we’re developing, every system I show you, whether it’s an unmanned surface vessel or unmanned undersea vessel, we are ensuring that we develop that modularity and have the interfaces, so as technology is ready we can insert it into the production line—not break the production line—and ensure we stay on track to deliver that capability.”8
This testing has continued—and even accelerated—under the new PMS-406 Program Manager, Captain Pete Small, who noted during the 2019 Navy League of the United States SeaAirSpace Symposium that, “We will bring in Navy program of record weapons systems to incorporate into commercially-derived modular craft.” He also explained how industry is challenged to design scaled-up versions of current USVs, but that this scaling-up initiative is one that is increasingly important to the Navy.9
However, the devil is in the details about how the U.S. Navy intends to bring new technologies to the warfighter. One example from our Navy experience suggests that we must pursue a thoughtful approach to inserting technological solutions to meet Fleet and Fleet Marine Force requirements, rather than depend on promising—but as-yet-unproven—technologies.
From Concept to Technology Adoption: Often a Bridge Too Far
Far too often the technological promise of a concept is so compelling that a solution is rushed to the Fleet with profoundly disastrous results. There is no better example to make this case than an unmanned system the U.S. Navy built and fielded decades ago, the QH-50 DASH (Drone Anti-Submarine Helicopter).
As the United States became involved in the Vietnam War during the early 1960s, the Navy renewed its efforts to find a way to field unmanned systems to meet urgent operational needs. At that time, all sea-based aviation was concentrated on the decks of Navy aircraft carriers and large-deck amphibious assault ships. Surface combatants—cruisers, destroyers and frigates—had no air assets at their disposal.
The solution was to adapt a technology that had been in development since the late 1950s and field the QH-50 DASH (Drone Anti-Submarine Helicopter). In April 1958, the U.S. Navy awarded Gyrodyne Company a contract to modify its RON-1 Rotorcycle, a small twin coaxial rotors helicopter, to explore its use as a remote-controlled drone capable of operating from the decks of small ships. By 1963 the Navy approved large-scale production of the QH-60C, with the ultimate goal of putting these DASH units on all its 240 FRAM-I and FRAM-II destroyers.
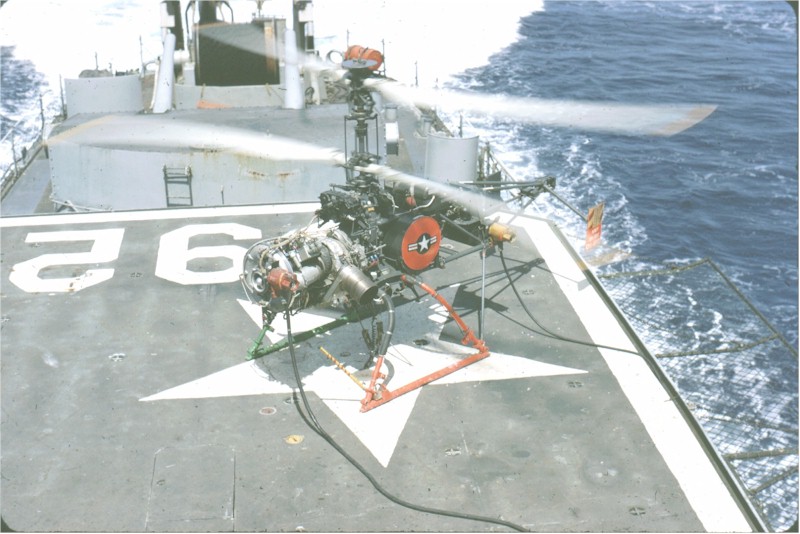
In January 1965 the Navy began to use the QH-50D as a reconnaissance and surveillance vehicle in Vietnam. Equipped with a real-time TV camera, a film camera, a transponder for better radar tracking, and a telemetry feedback link to inform the remote-control operator of drone responses to his commands, the QH-50D began to fly “SNOOPY” missions from destroyers off the Vietnamese coast. The purpose of these missions was to provide over-the-horizon target data to the destroyer’s five-inch batteries. Additionally, DASH was outfitted with ASW torpedoes to deal with the rapidly growing Soviet submarine menace, the idea being that DASH would attack the submarine with homing torpedoes or depth charges at a distance that exceeded the range of a submarine’s torpedoes.
A QH-50 DASH anti-submarine drone on board the destroyer USS Allen M. Sumner (DD-692) during a deployment to Vietnam. The photo was taken between April and June 1967. (Eric Bollin, USN, via Wikimedia Commons)
By 1970 however, DASH operations had ceased fleet-wide. Although DASH was a sound concept, the Achilles heel of the system was the electronic remote-control system. The lack of feedback loop from the drone to the controller accounted for almost 80 percent of all drone losses. While apocryphal to the point to being a bit of an urban legend, it was often said the most common call on the Navy Fleet’s 1MC general announcing systems during the DASH-era was, “DASH Officer, Bridge,” when the unfortunate officer controlling the DASH was called to account for why “his” system had failed to return to the ship and crashed into the water. Compared to technologies used to control unmanned systems today, that of the 50s to early 70s was primitive at best. In many cases, what was attempted with drones was, literally, a bridge too far.
Leading the Mine Warfare Renaissance with Tested and Proven Technologies
While the challenges of the Navy’s DASH systems are one example, we have witnessed other cases where technologies were inserted as solutions to Fleet or Fleet Marine Forces’ needs, only to fail—often spectacularly—to live up to the promise their developers hoped for. That is why we believe the U.S. Navy would be well-served to leverage—and combine—technologies that have been examined by commercial and other government agencies, and tested extensively in Navy exercises, experiments, and demonstrations to field a near-term MCM capability.
Over the past several years, in a series of Navy and Marine Corps (and other Service) events as diverse as the Ship-to-Shore Maneuver Exploration and Experimentation and Advanced Naval Technology Exercise (S2ME2 ANTX), the Battlespace Preparation in a Contested Environment, the Surface Warfare Distributed Lethality in the Littoral demonstration, the Citadel Protect Homeland Security Exercise, Dawn Blitz, Steel Knight, Military Ocean Terminal Concept Demonstration (MOTS CD), the Bold Alligator exercise series, and Valiant Shield, operators have field-tested a diverse number of emerging technologies.
Technologies proven in these, as well as other events, were the MANTAS Unmanned Surface Vehicle (USV), the Mine Neutralization System Remote Operated Vehicle (MNS ROV), and a suite of sensors developed and fielded by Teledyne Technologies Incorporated. We believe that the serial development of the MANTAS USV and MNS ROV, enabled by Teledyne sensors can provide an MCM capability for the U.S. Navy and Marine Corps today at low cost and with minimal technical risk.
Given the compelling need to creatively apply new, innovative technologies to address the operational and tactical challenges posed by mines, as well as the need to expand the use of unmanned systems to tackle MCM challenges, the ability to meet this need with commercial-off-the-shelf hardware and software—and not wager on emerging technologies that will take years to develop, mature and field—should be a priority for Navy and Marine Corps planners.
From Concept to Capability: What Would Such a System Look Like?
We hasten to emphasize that the components of this system-of-systems are not based on just concepts or drawings or early-stage prototypes. Rather, every component has been in the water and tested in the operational environment. The basic elements of our proposal are based on a multi-modal, multi-domain, modular approach and include several platforms.
As the hub of a best-in-class autonomous COTS MCM capability, the Navy should consider a scaled-up version of the T12 (twelve-foot) MANTAS high-speed catamaran proven in the exercises, experiments and demonstrations listed above. This T38 is similar in size to an eleven-meter RHIB carried by many U.S. Navy ships and thus can be easily integrated aboard most U.S. Navy warships. In comparison to an 11m RHIB, the T38 is 2 feet longer, 5 inches wider, drafts 17 inches shallower at max displacement, and boasts a cross-section height over 8 feet lower, making it extraordinarily hard to detect. The maximum displacement of the T38 is 40 percent lower than an 11m RHIB, while capacity for mission module sensors and systems is 25 percent higher; it carries more and is easier to handle. The T38 can operate in up to sea state five, has a cruise speed equal to, and a maximum speed twice that of an 11m RHIB, and a range four times that of the 11m RHIB. The T38 has an aft-mounted tow station for a mine-hunting sonar system and mine neutralization ROVs, and a submerged aft-hull well-deck configuration for simple autonomous launch and recovery of subsystems. The T38 can be fitted with a wide variety of sensors such as SeaBat F and T (series) sonars, X-Band Radar, Navigation Radar, SeaFLIR 230 Gyro Stabilized Hi-Res Camera, M400 Gyro stabilized EO/Thermal Camera, AIS and LIDAR Collision Avoidance system—among others—providing it with the ability to be closely controlled by a remote operator or operated autonomously.
The MANTAS features a suite of integrated sensors controlled by an Integrated Common Control Architecture housed in an installed or mobile control console. This unified design provides communications management, automated target recognition, and data management and processing. There are two primary MCM subsystems carried aboard the MANTAS.
The first is a tow-body mounted Synthetic Aperture Sonar (SAS) designed to search for mine-like objects (MLOs). This in-production COTS system can survey 3.5 km2/hr at a resolution sufficient for MLO classification. The system is programmable for bottom following, terrain referencing, and obstacle avoidance. As data comes aboard the USV, Automatic Target Recognition (ATR) will identify likely MLO anomalies, which will then be presented in near-real-time to the man–on-the-loop for verification as an MLO. Verified MLOs will be added as a waypoint for validation, while invalid MLOs will be discarded or passed to the navigation database as a hazard to navigation. Verified MLOs will be continuously updated to a recommended route for the Mine Neutralization System (MNS) Remotely Operated Vehicle (ROV). This route can be influenced by the watch team for various priorities such as route efficiency, most-valid to least-valid MLOs, or other operational considerations. After the area search is complete, the T38 will immediately transition from hunting to neutralizing by conducting a stern submerged well-deck recovery of the tow-body and launch of the tethered MNS ROV. This capability is a key feature in achieving Single Sortie Detect-to-Engage (SSDTE).
The MNS ROV conducts the “dull, dirty and dangerous” work previously conducted by classes of U.S. Navy ships by providing real-time HD video validation of mine-like objects. The MNS ROV autonomously executes the MLO route for final classification and man-on-the-loop validation of each MLO while the T38 shadows and supports it as an over the horizon communications link and countermine charge supply link. The classification, validation and engagement processes are then repeated until the field is cleared. The countermine charge detonation sequencing may be altered to detonate in any order and at any time desired to achieve mission success.
If this technical and operational solution sounds simple and achievable it is just that—a capability that exists today in its commercial subsystems that can be delivered to the U.S. Navy far more rapidly than anything the traditional acquisition system can provide. Navy officials have been provided with the details of this solution in a series of white papers and briefings and initial reactions have been positive. But that is not enough—not by a long shot.
While the individual components of this mine countermeasures solution have been extensively field tested with, collectively, thousands of hours of in-water use, the full-package of components has not yet been brought together in an exercise, experiments, and demonstrations such as those listed above so that Fleet operators can truly experience what this system-of-systems solution can provide. This milestone is slated for limited demonstration in Trident Warrior 2020.
Moving Forward with Effective—and Timely—Mine Countermeasures
During our decades of collective service in the operational Navy, we deployed to the Arabian Gulf a total of seven times—the same body of water where our shipmates on USS Samuel B. Roberts, USS Tripoli, and USS Princeton were seriously injured by mines. Because ships and sailors operate daily in harm’s way, we need to embrace an unmanned solution to dealing with deadly mines. We have the components for such a system, and it can reach fruition in the near-term.
If the U.S. Navy wants to buy-down inherent technical risk and challenge the paradigm of long-cycle FAR acquisition in the deadly serious business of MCM, then it is time to put a near-term solution in the water. While complex programs of record continue to develop next-generation technology, we should invest in parallel-path solutions that leverage mature subsystems ready to “Speed to Fleet” today. Once the Fleet sees the COTS solution that can be delivered with the system described above, we will be well on our way to providing the Navy with a way to defeat today’s mine threat.
LCDR U.H. (Jack) Rowley (USN – Retired) is a career Surface Warfare and Engineering Duty Officer whose 22 years of active duty included nine years enlisted service before commissioning. As a career destroyer sailor, he has served both in the Western Pacific as well as in the Mediterranean and Caribbean. Since his retirement, he has had extensive experience with the Oil and Gas Workboat community, and was the SAIC Lead Engineer on the early stages of the development of the DARPA Sea Hunter USV Trimaran. He is now the Chief Technology Officer for Maritime Tactical Systems, Inc (MARTAC).
SOCS Craig Cates (USN – Retired) is the Special Operations Team Lead for Teledyne Brown Engineering, Maritime Systems, a position he has held since transition from active duty in 2016. He served 27 years as a Sea Air Land (SEAL) Special Warfare Operator, including 14 years of Combat Development and Evaluation and Department of Defense Acquisition experience. His notable posts were: Seal Delivery Vehicle Pilot and Navigator, and Science and Technology Analyst. He continues to serve as an SDV OEM Test Pilot, and Diving Supervisor qualified in all SCUBA, semi-closed, and closed-circuit diving.
References
[1] Design for Maintaining Maritime Superiority 2.0 (Washington, D.C.: Department of the Navy, 2018), accessed at: https://www.navy.mil/navydata/people/cno/Richardson/Resource/Design_2.0.pdf.
[2] A 21st Century Warfighting Concept: Concept for Future Naval Mine Countermeasures in Littoral Power Projection (Washington, D.C.: Department of the Navy, May 1998) accessed at: https://fas.org/man/dod-101/sys/ship/weaps/docs/mcm.htm.
[3] U.S. Naval Mine Warfare Plan, Fourth Edition, Programs for the New Millennium (Washington, D.C.: Department of the Navy, January 2000).
[4] Draft report for comment, in the author’s possession.
[5] Grace Jean, “Navy Rethinking Mine Warfare,” National Defense Magazine, January 2008.
[6] “Take the Sailor out of the minefield,” is a common phrase in U.S. Navy parlance. Beyond saving lives, as one example of how unmanned systems would be vastly more cost effective for the Navy, consider an Avenger-class MCM vessel and an unmanned surface vessel. The Avenger-class MCM Vessels is a legacy system that is a purpose-built, dedicated ship. It is crewed by a nominal 85 officers and sailors. This means that every one hour of mine hunting/sweeping/clearing costs 85 man hours. Conversely, an autonomous unmanned system would be monitored by a watch stander crew of two to three sailors who only actively participate when higher-level decision authority is required. This represents an effort to effect ratio of 1:24 instead of 85:1.
[7] Megan Eckstein, “Navy Racing to Test, Field, Unmanned Maritime Vehicles for Future Ships,” USNI News, September 21, 2017, accessed at: https://news.usni.org/2017/09/21/navy-racing-test-field-unmanned-maritime-vehicles-future-ships?utm_source=USNI+News&utm_campaign=fb4495a428-USNI_NEWS_DAILY&utm_medium=email&utm_term=0_0dd4a1450b-fb4495a428-230420609&mc_cid=fb4495a428&mc_eid=157ead4942.
[8] Jon Harper, “Navy Officials Speed up Acquisition of Unmanned Maritime Systems,” National Defense Magazine Online, January 11, 2018, accessed at: http://www.nationaldefensemagazine.org/articles/2018/1/11/navy-officials-under-pressure-to-speed-up-acquisition-of-unmanned-maritime-systems. See also Richard Burgess, “Navy Acquisition Chief: ‘Reliably Deliver Capable Capacity,’” SEAPOWER Magazine Online, January 11, 2018, accessed at: http://seapowermagazine.org/stories/20180111-geurts.html.
[9] George Galdorisi, “Supporting Expeditionary Force Logistics with USV Technology,” SLDinfo.com, accessed at: https://sldinfo.com/2019/08/supporting-expeditionary-force-logistics-with-usv-technology/.
Featured Image: 190607-N-SB587-1203 GULF OF THAILAND (June 7, 2019) The Royal Thai Navy Lat Ya-class mine countermeasures ship HTMS Lat Ya (MHS 633), left, and the Avenger-class mine countermeasures ship USS Pioneer (MCM 9) observe a controlled mine detonation while conducting a joint mine countermeasures exercise during Cooperation Afloat Readiness and Training (CARAT) Thailand 2019. (U.S. Navy photo by Mass Communications Specialist 2nd Class Corbin Shea)